
 Schon
beim Entwurf der Sensorplatinen sollte man sich natürlich Gedanken machen ob
der Roboter später ein Gehäuse bekommen soll oder nicht. Wenn man sich die Roboter-Bilder
in unserem und in anderen Fotoalben anschaut, dann wird man sehen das ein großer
Teil der Bastler eigentlich ganz auf ein Gehäuse verzichtet. Irgendwie ist es
ja auch ein reizvolle Sache wenn man die Teils verwirrende Verkabelung und die
Schaltkreise direkt sieht. Soll sich der Roboter jedoch im Freien bewegen, da
würde ich schon zu einem Gehäuse raten. Die Elektronik ist in Bezug auf Staub,
Laub, Insekten manchmal doch etwas empfindlich. Da mein Roboter auch mehr für
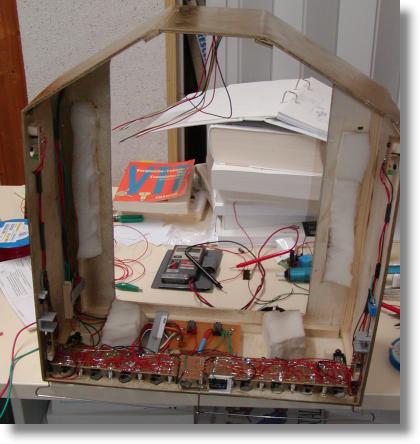
den praktischen Einsatz gedacht war, habe ich mich zu einem Sperrholzgehäuse,
das den Antrieb und die Sensoren abdeckt, entschieden. Der obere Teil sollte
später durch eine runde Bauform abgedeckt werden.
Schon
beim Entwurf der Sensorplatinen sollte man sich natürlich Gedanken machen ob
der Roboter später ein Gehäuse bekommen soll oder nicht. Wenn man sich die Roboter-Bilder
in unserem und in anderen Fotoalben anschaut, dann wird man sehen das ein großer
Teil der Bastler eigentlich ganz auf ein Gehäuse verzichtet. Irgendwie ist es
ja auch ein reizvolle Sache wenn man die Teils verwirrende Verkabelung und die
Schaltkreise direkt sieht. Soll sich der Roboter jedoch im Freien bewegen, da
würde ich schon zu einem Gehäuse raten. Die Elektronik ist in Bezug auf Staub,
Laub, Insekten manchmal doch etwas empfindlich. Da mein Roboter auch mehr für
den praktischen Einsatz gedacht war, habe ich mich zu einem Sperrholzgehäuse,
das den Antrieb und die Sensoren abdeckt, entschieden. Der obere Teil sollte
später durch eine runde Bauform abgedeckt werden.
Mit etwas Geschick bekommt man mit Sperrholz und Holzleim eigentlich recht schnell die verschiedensten Bauformen hin. Die Ecken kann man innen mit kleinen Leisten so verstärken, dass der Roboter auch schon mal Kontakt mit der Wand aufnehmen kann ;-)
Damit die IR-Sensoren auch etwas
sehen, muß man natürlich einige Löcher im Gehäuse anbringen. Bei jedem Sensor
ein kleines Loch für die IR-LED-Reflektor, eine LED-Kontrollampe und ein großes
Loch hinter dem man den IS471 anordnet. Auch das  bekommt
man notfalls sogar noch mit einem Akku-Schrauber und Senkkopf gut hin. Gut bedenken
sollte man allerdings den Bodenabstand der Sensoren. Werden die Sensoren zu
tief angebracht, so kommt es schnell vor das der Boden den IR-Lichtstrahl reflektiert
und selbst als Hinderniss gemeldet wird. Am besten macht man hier einige Testversuche!
In diesem Baustadium sollte man auch schon an eine spätere Stoßstange
denken. Auch diese kann später eventuell IR-Strahlen reflektieren.
bekommt
man notfalls sogar noch mit einem Akku-Schrauber und Senkkopf gut hin. Gut bedenken
sollte man allerdings den Bodenabstand der Sensoren. Werden die Sensoren zu
tief angebracht, so kommt es schnell vor das der Boden den IR-Lichtstrahl reflektiert
und selbst als Hinderniss gemeldet wird. Am besten macht man hier einige Testversuche!
In diesem Baustadium sollte man auch schon an eine spätere Stoßstange
denken. Auch diese kann später eventuell IR-Strahlen reflektieren.
Wenn man einigermaßen genau arbeitet, kann man später die Sensorplatinen einfach nur aufstecken. Durch die Fassung und die LED hält diese eigentlich schon sehr gut. Mit einer Mittelschraube und einem kleinen eingeklebten Holzstück kann man die Platine natürlich auch anschrauben.
 Da
die Sensoren an den Seiten eigentlich nur dem folgen einer nahen Wand dienen
sollten, brauchte ich dort keine allzu große Reichweite. In dem Fall verwendete
ich den IS471 in der Standardschaltung ohne Reflektor. Hier muß man allerdings
darauf achten, dass der IR-Strahl nicht direkt auf das IC fällt, ein Stückchen
Schrumpfschlauch löst auch dieses Problem.
Da
die Sensoren an den Seiten eigentlich nur dem folgen einer nahen Wand dienen
sollten, brauchte ich dort keine allzu große Reichweite. In dem Fall verwendete
ich den IS471 in der Standardschaltung ohne Reflektor. Hier muß man allerdings
darauf achten, dass der IR-Strahl nicht direkt auf das IC fällt, ein Stückchen
Schrumpfschlauch löst auch dieses Problem.
Nachdem alle Sensoren angebracht waren, zählte ich immerhin 13 IR Sensoren, zwei Sharp-Sensoren, eine Lichtschranke und eine Stoßstange mit 3 Mikroschaltern. Dazu sind also wirklich einige Ports notwendig! Da ich aber das Gehäuse leicht abnehmbar gestalten wollte mußte eine einfache Steckverbindung her. Eine gute Lösung ist hier der I2C-Bus. Über den I2C Bus lassen sich sehr bequem zusätzliche Schaltkreise wie Porterweiterungen an einen Controller anschließen. Der große Vorteil ist, dass man dafür nur 2 Drähte benötigt Daher ist es immer empfehlenswert so einen Porterweiterungsbaustein PCF8574AP direkt dort unterzubringen wo die Ports benötigt werden, man erspart sich allerhand Kabelgewirr.
Auf diese Weise konnte ich die gesamte untere Sensorelektronik mit einem nur 8 poligem Stecker mit einer der Mainboard-Platinen verbinden. Da das Gehäuse nur auf zwei U-Trägern auflag und durch eingeklebten Schaumstoff fixiert wurde, konnte man somit sehr schnell das Gehäuse abnehmen. Ein Umstand, den man oft mit der Zeit schätzen lernt.

Nachdem Sensoren und Gehäuse soweit waren, kann man auf der oberen Experimentierplatine die restlichen Dinge unterbringen. In meinem Fall waren das noch mal ein PCF als Porterweiterung, drei Relais (für Staubsauger, Liftmotor Ein und Liftmotor Richtung), die notwenigen Transistortreiber für die Relais, Spannungsteiler um Betriebsspannung an analogen Port zu überwachen und jede Menge Steckkontakte. Es hat sich als sehr vorteilhaft erwiesen wenn man möglichst alles bei einem Roboter steckbar macht. Auf diese Weise kann man einzelne Platinen später sehr schnell herausnehmen und modifizieren oder gegen eine andere austauschen. Conrad und Reichelt bieten recht günstige Steckverbinder, die zum Teil schon mit Kabel versehen sind.
![]()
<zurück> Gehe
zu Seite <0> <1> <2> <3> <4> <5> <6>
<7> <8> <weiter>
Roboter-Tutorial
- Thema: "Ich
will einen Roboter bauen - nur wie?"