
Nachdem man einen Rahmen (Chassie)
gebastelt hat, kann dazu über gegangen werden Räder und Motoren zu montieren.
Das einfachste wäre es, wenn man die Räder direkt an der 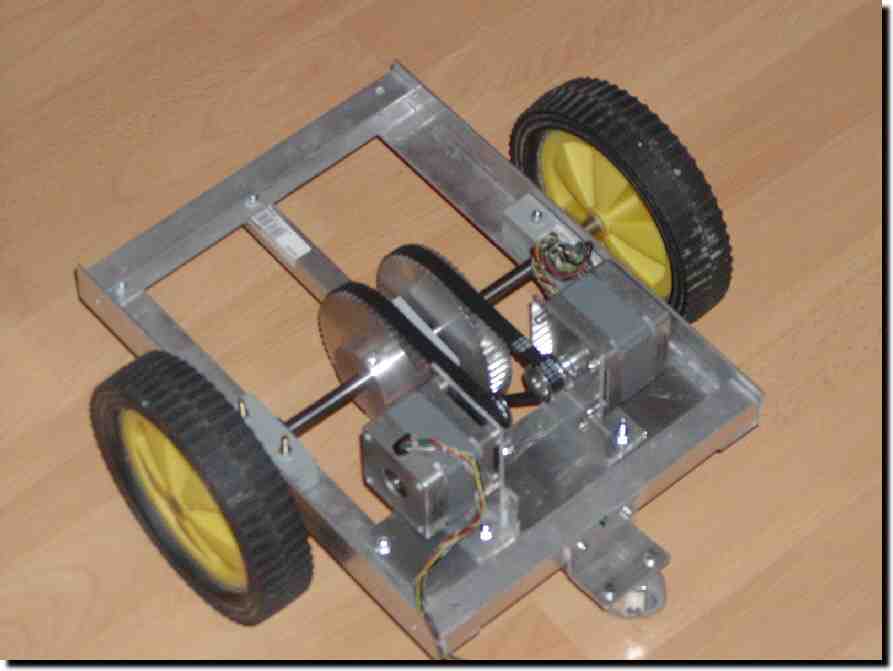 Achse
des Motors befestigt (Direktantrieb). In der Regel ist das auch bei Schrittmotoren
und Getriebemotoren durchaus üblich, jedoch nur bei leichten Robotern. Sollte
der Roboter mehr als ca. 2-3 kg wiegen, dann wirkt doch schon eine enorme
Kraft auf die Motorachse, was zumindest bei kleineren Motoren zur Beschädigung
der Lager führen kann. Die erlaubte Achslast ist meist aus den Datenblättern des Motors
zu entnehmen, kann jedoch von einem etwas geübten Bastler in der Regel auch
anhand des Achs- und Motordurchmessers grob geschätzt werden. Dass ein Scheibenwischermotor
mit 8 mm Achse schon einige kg verträgt, das sieht glaube ich auch der Laie.
Achse
des Motors befestigt (Direktantrieb). In der Regel ist das auch bei Schrittmotoren
und Getriebemotoren durchaus üblich, jedoch nur bei leichten Robotern. Sollte
der Roboter mehr als ca. 2-3 kg wiegen, dann wirkt doch schon eine enorme
Kraft auf die Motorachse, was zumindest bei kleineren Motoren zur Beschädigung
der Lager führen kann. Die erlaubte Achslast ist meist aus den Datenblättern des Motors
zu entnehmen, kann jedoch von einem etwas geübten Bastler in der Regel auch
anhand des Achs- und Motordurchmessers grob geschätzt werden. Dass ein Scheibenwischermotor
mit 8 mm Achse schon einige kg verträgt, das sieht glaube ich auch der Laie.
In
meinem Fall wäre das Gewicht bei weitem über die erlaubte Achslast hinausgegangen,
weshalb ich mich von vornherein auf eine getrennte Achse mit Getriebeuntersetzung
durch Zahnriehmen (Untersetzung 6:1) entschieden habe (siehe Bild). Bei den
Rädern habe ich mich für Räder eines Rasenmähers (14cm Durchmesser) entschieden,
die lagen noch zufällig im Keller ;-)
Zahnriehmen und Zahnriehmenscheiben bekommt man bei den verschiedensten Anbietern, u.a. im Conrad-Modellbaukatalog. Da bekommt man im übrigen auch Achsen, Profile, Kugellager und alles was man so braucht. Aufgrund des Gewichtes und der großen Räder habe ich mich für eine 10 mm Achse entschieden. Bei kleineren Robotern mit wenig Gewicht kann man durchaus auch mit Gewindestangen erste Versuche machen. Diese sind billiger und einfacher zu bekommen.
Insbesondere bei etwas schwereren Robotern sollte man die Achse in jedem Fall über ein Kugellager an der Chassie befestigen. Die Befestigung der Kugellager in Alu-Gehäusen ist für Bastler, die mit Werkzeugen nicht so optimal bestückt sind, nicht immer ganz einfach. Ich habe da schon die seltsamsten Konstrukte gesehen. Da ich mir dies auch nicht so schwer machen wollte, habe ich mir einfach ein Vierkant Plastikstab (ca. 25mm Kantenlänge) und einen dicken Metallbohrer mit dem Außendurchmesser des Kugellagers besorgt. Dann habe ich zuerst ein Loch mit dem Durchmesser der Achse in diesen Plastikblock gebohrt und anschließend habe ich die Bohrung einige mm tief mit dem großen Bohrer erweitert. So konnte ich relativ leicht das Kugellager in dem Plastikblock versenken und so montieren, dass das Kugellager sich nicht verschiebt. Aber wie gesagt, hier gibt es unzählige Möglichkeiten, das war nur Eine - schaut euch einfach mal einige Roboter-Bilder an.
 Auch
bei der Besfestigung des Rades habe ich schon die unterschiedlichsten Lösungen
gesehen. Auch hier habe ich mich zu einer einfachen Lösung entschieden, nämlich
kleben. Zuerst habe ich einen Alleskleber wie Patex verwendet. Das Ergebnis
war aber nicht sehr überzeugend, daher bohrte ich noch quer durch Achse und Rad
und schob einen kleinen Nagel als Bolzen ein. Aber auch das war nicht perfekt,
das Rad hatte immer noch zuviel Spiel.
Auch
bei der Besfestigung des Rades habe ich schon die unterschiedlichsten Lösungen
gesehen. Auch hier habe ich mich zu einer einfachen Lösung entschieden, nämlich
kleben. Zuerst habe ich einen Alleskleber wie Patex verwendet. Das Ergebnis
war aber nicht sehr überzeugend, daher bohrte ich noch quer durch Achse und Rad
und schob einen kleinen Nagel als Bolzen ein. Aber auch das war nicht perfekt,
das Rad hatte immer noch zuviel Spiel.
Dann fand ich im Baumarkt einen perfekten
Kleber TURBO2000 UNIVERSAL (wird in 3g Fläschlein geliefert, siehe Bild), der alle Probleme
sofort beseitigte. Zwei Tropfen auf die Achse, dann schnell ins Rad schieben
und in 2 Minuten ist das ganze bombenfest. Selbst bei 20 kg Robotergewicht gab
es später keinerlei Probleme mit den Rädern!
 Natürlich muß man auch die Achse
so befestigen, dass diese nicht aus der Chassie herausrutscht. Hier kann man beispielweise Stellringe
nehmen, die lassen sich bequem aufschieben und mit Madenschraube befestigen.
Ich verwendete Wellensicherheitsringe, die einfach aufgesteckt werden. Damit
sich die Wellensicherheitsringe nicht verschieben, sollte man die Achse vorher
rundrum ein klein wenig ansägen. Auf diese Weise kann man übrigens auch 8mm
Stellringe für eine 10 mm Achse verwenden, falls man mal nicht das passende
parat hat.
Natürlich muß man auch die Achse
so befestigen, dass diese nicht aus der Chassie herausrutscht. Hier kann man beispielweise Stellringe
nehmen, die lassen sich bequem aufschieben und mit Madenschraube befestigen.
Ich verwendete Wellensicherheitsringe, die einfach aufgesteckt werden. Damit
sich die Wellensicherheitsringe nicht verschieben, sollte man die Achse vorher
rundrum ein klein wenig ansägen. Auf diese Weise kann man übrigens auch 8mm
Stellringe für eine 10 mm Achse verwenden, falls man mal nicht das passende
parat hat.
Für die Befestigung des Motors kann man sich aus einer Aluplatte und einem L-Profil ganz schnell und einfach einen passenden Winkel basteln. Alternativ könnte man sich auch einen fertigen Winkel besorgen oder einen aus Alu biegen. Die Befestigung der Riemenscheibe erfolgt einfach über Madenschrauben. Noch sicherer sitzt die Riemenscheibe wenn man eine Kante der Achse etwas flach anschleift, auch das geht mit einer Feile schneller als man denkt.
Nachdem Motor und Räder montiert
und der Antrieb fertiggestellt ist, wendet man sich gewöhnlich der Elektronik
zu. Da ich mit Schrittmotoren zu der Zeit noch keine Erfahrung hatte, wollte
ich natürlich so schnell wie möglich das Teil mal zum Drehen bringen, also begann
ich mit dem Aufbau des Motortreibers. Ich entschied mich für den Aufbau zwei
L297/L298 Schaltungen auf einer Experimentierplatine mit Streifenraster. Wie
auf dem Bild zu 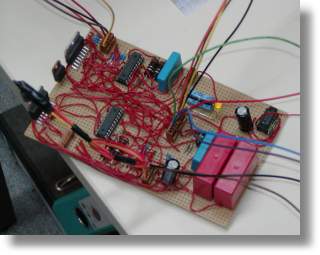 erkennen ist, wurden die Bauteile recht wild mit normalen isolierten
Kupferdraht verschaltet. Wesentlich einfacher und schöner lässt sich dies allerdings
mit Kupferlackdraht auf der Unterseite der Platine machen - allerdings hatte
ich keinen mehr in meiner Bastelstube und wie man sieht geht es auch anders.
erkennen ist, wurden die Bauteile recht wild mit normalen isolierten
Kupferdraht verschaltet. Wesentlich einfacher und schöner lässt sich dies allerdings
mit Kupferlackdraht auf der Unterseite der Platine machen - allerdings hatte
ich keinen mehr in meiner Bastelstube und wie man sieht geht es auch anders.
Da ich die Motoren testen wollte, aber noch keinen Microcontroller hatte, hab ich gleich noch einen kleinen Taktgeneratot mit dem TTL-Schaltkreis 7413 auf der Platine gelötet. Den Takt konnte man so ganz einfach auf beide Clock-Eingänge legen. Die anderen Eingänge wurden entsprechend überbrückt und beschaltet (siehe Schrittmotorenseite). Und siehe da, die wild verdrahtete Platine funktionierte auf Anhieb, die Chassie bewegte sich. Jetzt konnte ich auch in etwa abschätzen wie stark mein Schrittmotor war - einfach mal einige Hindernisse in den Weg legen oder das Rad festhalten bis der Motor ein Schritt verliert. Da der Motor nur 60 Schritte pro Umdrehung benötigt, konnte jeder Laie hören wenn der Motor aufgrund der Belastung einen Schritt nicht ausführen konnte (man spricht von "Schritt verlieren"). Ich war eigentlich positiv überrascht über dessen Stärke und war sicher, dass er einige kg vertragen würde. Später stellte sich dann heraus, dass der Roboter doch zu schwer wurde, ein kleines Hinderniss sorgte dann schon für Schrittverluste. Somit habe ich ihn später durch einen anderen Schrittmotor ersetzt! Wichtig für die Beurteilung ob der Schrittmotor stark genug ist oder nicht, ist die Endgeschwindigkeit des Roboters. Ein Staubsaugerroboter wie meiner muss sich ja nur sehr langsam bewegen, das kommt Schrittmotoren zu gute, denn mit steigender Geschwindigkeit verlieren diese an Kraft. Somit hätte ich ca. 5 kg ohne Probleme auch mit diesem kleinen Motor bewegen können - das hab ich ja auch eine Weile gemacht.
![]()
<zurück> Gehe
zu Seite <0> <1> <2> <3> <4> <5> <6>
<7> <8> <weiter>
Roboter-Tutorial
- Thema: "Ich
will einen Roboter bauen - nur wie?"