|
Motoren für Roboter |
|
Getriebemotoren wie den RG35 gibt es für ca. 15 - 20 Euro im Elektronikhandel mit unterschiedlichen Umdrehungszahlen pro Minute. Für kleinere Roboter bis etwa 5 KG reichen diese Motoren fast immer aus, insbesondere wenn die Roboter nur in der Wohnung unterwegs sind und keine Steigungen oder Hinternisse bewältigen müssen. Je nach Radgröße sind Umdrehungszahlen zwischen 10 und 100 Umdrehungen pro Minute am sinnvollsten.
100 Ncm entsprechen 1 mNm Das Drehmoment ist die Kraft mal den Weg. Ich möchte Euch nu nicht mit der ganzen Mathematik von meiner Webseite verscheuchen, daher nur ein paar Beispiele: Wenn man an den Zeiger einer Turmuhr in der Stellung auf 3 Uhr ein Gewicht von 10 kg hängt, wirkt auf die Achse ein Drehmoment von 100 Nm (also 10000 Ncm).Ein Getriebemotor mit 100 Ncm könnte beispielsweise bei einem Hebel von 1 cm (an der Achse) noch 10 KG heben. Eine ganz schöne Leistung nicht wahr. Kleinere Getriebemotoren (3- 10 cm Länge) haben meißt eine maximale Kraft von 50 - 900 mNm hinter dem Getriebe. Vor einem Getriebe sind es je nach Untersetzungsfaktor oft nur 50 bis 200 Ncm. Die Hersteller geben manchmal das Drehmoment vor - und manchmal nach dem Getriebe an. Hier kommt es daher immer wieder zu Verwechslungen, also immer gut aufpassen. In der Regel reicht ein Getriebemotor wie der RG35 mit ca. 0,6 Ncm (vor Getriebe mit goßer Untersetzung z.B. 1:100 oder 1:200) für kleine Roboter fast immer aus. Bei einer Untersetzung 1:100 sind das immerhin fast 40 Ncm. Noch kleinere Roboter können auch
mit Servos angetrieben. Einige Bastler haben herausgefunden das
man Servos mit etwas Geschick auseinandernehmen kann und mit wenig
Aufwand so austricksen kann, das diese als ganz normale Motoren
arbeiten (also 360 Grad Volldrehungen machen können). Allerdings
reichen Servos aufgrund der Plastikzahnräder wirklich nur für Kleinsroboter. Nachteile von Getriebemotoren Getriebemotoren haben zwar den Vorteil
das Sie recht günstig, recht klein und recht einfach anzusteuern
sind, aber Sie haben auch Nachteile. Ein Roboter der sich in einer
Umgebung haargenau zurecht finden soll, muß kerzengerade und auch
Kurven in genau definierten Winkel fahren können. Dies ist mit Getriebemotoren
nicht so einfach, denn die Motoren bleiben ja nicht sofort stehen
wenn die Spannung abgeschaltet wird. Zudem drehen sie sich je nach
Bodenbeschaffenheit mal langsamer und mal schneller. Der Roboter
weiß also nie genau wieviel Umdrehung das Rad nun eigentlich wirklich
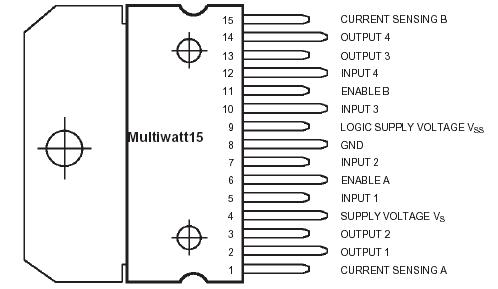
gemacht hat. Daher bin ich kein großer Freund von Getriebemotoren als Roboter-Antrieb. Ich favorisiere die sogenannten Schrittmotoren. Schrittmotoren gelten als recht kompliziert in der Ansteuerung und recht schwach. Das dies nicht der Fall ist erläutere ich auf der Seite Schrittmotoren. Dort zeige ich das selbst schwere Roboter bis zu ca. 15 kg sehr gut mit Schrittmotoren bewegt werden können. Zumindest wenn nicht unbedingt auch hohe Geschwindigkeiten notwendig sind. Der Steuerungsaufwand ist zudem erheblich einfacher als bei Getriebemotoren. Meine Lieblingsschaltung für Getriebemotoren
bis ca. 2A Dauerbelastung
Der verwendete L298
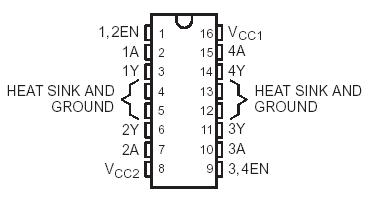
Eine Alternative für kleine Motoren bis ca. 1 A ist der L293D:
(Fotoquelle: http://www.the-starbearer.de)
Noch mehr Power gewünscht? Ein noch recht unbekannten aber interessanten Motorchip hab ich erst vor kurzem entdeckt, nämlich ein SMD-Chip aus dem KFZ-Bereich: vnh3sp (Datenblatt im Download-Bereich). Mit ihm lassen sich sogar recht große Motoren ansteuern, vorausgesetzt man kühlt ihn entsprechend. Aber selbst ohne Kühlung bietet er bedeutet mehr Leistung als der L298. Das schöne, die Ansteuerung ist kaum anders als beim L298. Kleiner Nachteil: Da es ein SMD-Chip mit 1mm Kontaktabstand ist, muss man schon eine geeignete Platine (spezielles Layout mit Kühlflächen) und etwas Löterfahrung besitzen. Inzwischen gibt es aber schon verschiedene RN-Projekte mit dem Chip (RN-Power, RN-Mini H-Bridge), Platinen und Chip können über den Robotikhardware.de-Platinenservice bezogen werden. Bauanleitung und Beschreibung im Roboternetz
Weiterführende Links zum Thema Motoren: Bezugsquelle für Schrittmotoren |
Weitere Beiträge und Schaltpläne
zu Sensoren und andere Dinge werden bald folgen. Wenn Ihr schon etwas dazu geschrieben
habt
und ich das übernehmen kann, dann laßt es mich wissen. Natürlich verlinke
ich dann gerne auch Eure Webseite entsprechend.
> zur Roboter/Elektronik Startseite <
 Welchen
Motor nimmt man am besten für einen Roboter? Diese Frage wird in
den wenigen Roboter-Foren die es überhaupt gibt, fast täglich gestellt.
Oft bleibt die Frage leider unbeantwortet oder wird zumindest widersprüchlich
beantwortet.
Welchen
Motor nimmt man am besten für einen Roboter? Diese Frage wird in
den wenigen Roboter-Foren die es überhaupt gibt, fast täglich gestellt.
Oft bleibt die Frage leider unbeantwortet oder wird zumindest widersprüchlich
beantwortet.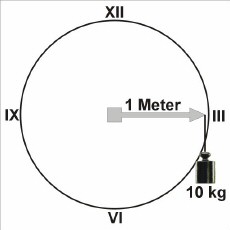 Die
Kraft eines Motors wird durch das sogenannte Drehmoment angegeben.
Beim Kauf sollte imme rauf diese Angabe geachtet werden. Die Einheit
Newton wird mit mNm bzw. Ncm abgekürzt.
Die
Kraft eines Motors wird durch das sogenannte Drehmoment angegeben.
Beim Kauf sollte imme rauf diese Angabe geachtet werden. Die Einheit
Newton wird mit mNm bzw. Ncm abgekürzt.