

|
IS471F - Hindernisserkennung mit Infarot Distanzsensor |
|
Der normale Schaltungsaufbau sieht
also wie rechts abgebildet aus!
Weitere Links/Tips
zum IS471: |
|
Hindernisserkennung und Entfernungsmessung mit den Sharp-Bausteinen |
|
Sharp hat eine ganz interessante
Serie von Bausteinen herausgebracht mit denen ein Roboter sogar
recht genau Entfernungen messen kann. Einige der beliebtesten Bausteine
sind: (es gibt noch weitere) Sharp GP2D12 - Datenblatt Oft werden selbst in kleinen Roboter-Projekten mehrere dieser Sensoren genutzt |
|
Ultraschall Hindernisserkennung und Entfernungsmessung |
|
Überlegenswert ist, ob man einen solchen Sensor nicht drehbar am Roboter befestigt. Daurch hat der Roboter einen verhältnismäßig günstigen Rundumblick. SRF 04 - Deutsches
Datenblatt |

Weitere Beiträge und Schaltpläne
zu Sensoren und andere Dinge werden bald folgen. Wenn Ihr schon etwas dazu geschrieben
habt
und ich das übernehmen kann, dann laßt es mich wissen. Natürlich verlinke
ich dann gerne auch Eure Webseite entsprechend.
 Damit
der Roboter nicht ständig vor die Wand oder ein anderes Hinderniss
fährt sind DIstanzsensoren notwendig. Die einfachste Lösung wäre
eine Art Stoßstange welche mit Microschaltern verbunden wird. Eine
solche Lösung ist recht günstig und funktioniert bei langsamen Robotern
auch relativ gut. Allerdings kann es bei schwereren oder auch schnelleren
Robotern durchaus mal einige Kratzer an den besten Möbelstück geben.
Daher sind Infarot-Sensoren oder auch Ultraschall-Sensoren sehr
beliebt. Das hier vorgestellte IC IS441F erlaubt eine einfach und
sogar recht preisgünstige Hinternisserkennung per Infarot. Dazu
muß im wesentlichen nur noch eine Infarot-Diode an das IC angeschlossen
werden. Das modulierte Licht wird von einem gegenstan direkt auf
das IC zurückgeworfen und somit das Hinterniss erkannt.
Damit
der Roboter nicht ständig vor die Wand oder ein anderes Hinderniss
fährt sind DIstanzsensoren notwendig. Die einfachste Lösung wäre
eine Art Stoßstange welche mit Microschaltern verbunden wird. Eine
solche Lösung ist recht günstig und funktioniert bei langsamen Robotern
auch relativ gut. Allerdings kann es bei schwereren oder auch schnelleren
Robotern durchaus mal einige Kratzer an den besten Möbelstück geben.
Daher sind Infarot-Sensoren oder auch Ultraschall-Sensoren sehr
beliebt. Das hier vorgestellte IC IS441F erlaubt eine einfach und
sogar recht preisgünstige Hinternisserkennung per Infarot. Dazu
muß im wesentlichen nur noch eine Infarot-Diode an das IC angeschlossen
werden. Das modulierte Licht wird von einem gegenstan direkt auf
das IC zurückgeworfen und somit das Hinterniss erkannt.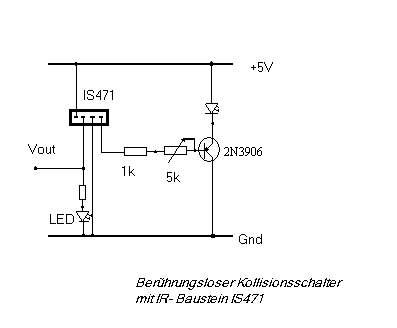 Die
normale Reichweite ist in gewissen Grenzen abhängig von der Farbe
des Hinternisses. In der Regel reicht es jedoch duchaus einige cm
so das langsame Roboter durchaus sehr gut damit zurecht kommen.
Durch besondes helle Infarot LED´s und durch zusätzlich LED-Fassungen
kann man die Reichweite erhöhen. Wem das noch nicht reicht, der
kann über einen zusätzlichen Transistor die Strahlungsleistung der
LED noch weiter erhöhen. Zu diesem Thema hat bereits ein anderer
Roboter-Bastler einige Experimente gemacht. Schaut also mal auf
dieser Seite:
Die
normale Reichweite ist in gewissen Grenzen abhängig von der Farbe
des Hinternisses. In der Regel reicht es jedoch duchaus einige cm
so das langsame Roboter durchaus sehr gut damit zurecht kommen.
Durch besondes helle Infarot LED´s und durch zusätzlich LED-Fassungen
kann man die Reichweite erhöhen. Wem das noch nicht reicht, der
kann über einen zusätzlichen Transistor die Strahlungsleistung der
LED noch weiter erhöhen. Zu diesem Thema hat bereits ein anderer
Roboter-Bastler einige Experimente gemacht. Schaut also mal auf
dieser Seite: 
 Durch
ein spezielles Verfahren ist dies auch unabhängig von der Farbe
und Helligkeit des Hindernisses. Da die Ansteuerung der Bausteine
sehr einfach ist (oft können diese direkt an den Microcontroler
Port angeschlossen werden), finden diese Bausteine sehr große Verbreitung
unter den Roboter-Bastlern. Der einzige Nachteil, die Bausteine
sind nicht ganz billig. Derzeit kosten diese meißt etwas über 20
Euro!
Durch
ein spezielles Verfahren ist dies auch unabhängig von der Farbe
und Helligkeit des Hindernisses. Da die Ansteuerung der Bausteine
sehr einfach ist (oft können diese direkt an den Microcontroler
Port angeschlossen werden), finden diese Bausteine sehr große Verbreitung
unter den Roboter-Bastlern. Der einzige Nachteil, die Bausteine
sind nicht ganz billig. Derzeit kosten diese meißt etwas über 20
Euro!  Neben
Infarot eignen sich auch Ultraschall-Entfernungsmesser ideal für
Roboter. Der Vorteil besteht darin, das diese Sensoren noch wesentlich
größere Entfernungen recht genau messen können. Der Nachteil besteht
wohl darin das der Aktionsradius nicht so punkgenau wie bei Infarotsensoren
ist. Zudem sind nicht alle Billigbausätze sonderlich tauglich. Recht
empfehlenswert sollen die Module SRF04 und SRF08 sein. Auch hier
sind leider die Preise nicht ganz billig. Der SRF 04 kostet über.
20 und der SRF 08 sogar über 40 Euro!
Neben
Infarot eignen sich auch Ultraschall-Entfernungsmesser ideal für
Roboter. Der Vorteil besteht darin, das diese Sensoren noch wesentlich
größere Entfernungen recht genau messen können. Der Nachteil besteht
wohl darin das der Aktionsradius nicht so punkgenau wie bei Infarotsensoren
ist. Zudem sind nicht alle Billigbausätze sonderlich tauglich. Recht
empfehlenswert sollen die Module SRF04 und SRF08 sein. Auch hier
sind leider die Preise nicht ganz billig. Der SRF 04 kostet über.
20 und der SRF 08 sogar über 40 Euro!