-
 Werbung
Werbung
-
Super-Moderator
Lebende Robotik Legende

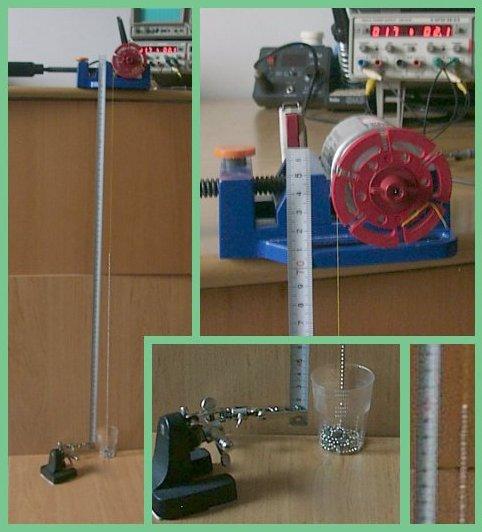
Motor an der Kette
Der Motor liegt an der Kette.
Es ist ein Glockenankermotor mit 30 Ohm Innenwiderstand und hohem Wirkungsgrad.
Die Kette ist 96cm lang und ihre Masse beträgt 13g.
Sie liegt zum Teil am Boden des Bechers. Sie ist mit einem Zwirnsfaden an die Seilrolle mit effektivem Durchmesser von 58mm angebunden. Die Seilrolle ist auf die glattgedrehte Nabe gesteckt und rutscht bei langsam drehendem Motor durch, wobei sich eine konstante Steighöhe der Kette einstellt.
Das Netzteil, an das der Motor angeschlossen ist, ist auf 2,1V eingestellt. Die Stromaufnahme des Motors beträgt 17mA.
a.) Wie schnell dreht sich die Motorwelle?
b.) Wie hoch wird die Drehzahl der Motorwelle wenn der Faden gerissen und die Kette in den Becher heruntergefallen ist?
Manfred
 Berechtigungen
Berechtigungen
- Neue Themen erstellen: Nein
- Themen beantworten: Nein
- Anhänge hochladen: Nein
- Beiträge bearbeiten: Nein
-
Foren-Regeln
Werbung 








Lesezeichen