







Der geplante TL074 als Spitzenwertgleichrichter ist viel zu langsam, bei ca. 100kHz wird das Ausgangssignal immer kleiner ( von wegen GBW 13MHz ).Wie schaut es bei deinem Projekt aus? Schon weiter?
Ich werde an dieser Stelle einen LT1633 testen.
Bei höheren Frequenzen hab Ich leider nur 8Vpp.
Da möchte Ich dann den OPA892 als Endstufe und den OPA810 als Treiber einsetzen und die Spannung für die OP's auf +-9V erhöhen.
Sonst müsste der Gleichspannungsoffset ziemlich klein bleiben.
Die OP-Amps die Ich bis jetzt drin habe vertragen leider nur +-6V.
Als AM Modulationsquelle möchte Ich einen Optokoppler mit FET Ausgang H11F1M benutzen.
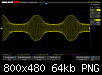
Die AM Modulation funktioniert im Prinzip, leider ist das Signal alles andere als linear ( siehe Bild ), zudem stimmte das Datenblatt des Optokopplers ( H11F1M ) nicht mit den Typen überein die Ich bekommen habe.
Laut Datenblatt ist der Ausgang auf 4 und 6. Bei meinen war er aber auf 4 und 5.
Ich möchte nun den Ausgang des Optokoppler's mit einer Gleichspannung vorspannen und das AM Signal über einen Kondensator einspeisen.
Am Optokoppler Ausgang müssen immer mindestens 0,1V anliegen, damit er linear arbeitet, wenn man dem Datenblatt glauben kann.
Die o.g. Bauteile hab Ich erst gestern bekommen.
Ich muss Die erst mal auf Adapterplatinen löten, damit Ich die auf mein Versuchsboard kriege.
Das sollte übers Wochenende klappen.
Das ist der aktuelle Stand - wenn Du eine gute Idee für die Amplitudenregelung ( AM ) hast, immer her damit.
Zu Deinem Projekt:
Also ein ATMEGA hat mindestens einen 16Bit Timer, Die A-Typen laufen auch mit 20MHz.
Der Nachteil ist, das die Timer immer bis zum Höchstwert laufen, OK CTC wäre auch möglich.
Der zweite Comparematch würde dann die Pulsweite bestimmen.
0,3Hz bis 2MHz sollten möglich sein.
Ob das geht hab Ich so noch nicht getestet.
Bei niedrigen Frequenzen müsstest du den Prescaler erhöhen, dann geht das auch für ganz niedrige Frequenzen.
Die Potis könntest Du über den A/D Wandler 10Bit abfragen ( Ich denk mal, das ELEKTOR das auch so gemacht hat ) und das Signal mit dem Timer generieren.
Als Anzeige würde Ich nach wie vor ein LCD oder OLED Display nehmen, das dann die aktuellen Werte anzeigt.
Das nur über die Potis und ne PLL zu machen wäre mir viel zu ungenau.
Wenn Du als Spannungsregler z.B. einen TSR 1-2450 ( max. Eingangsspannung 36V für die 5V Versorgung nimmst, sparst Du den Kühlkörper, der bei einem 7805 nötig wäre und auch Strom auf der 24V Schiene.
Als Absicherung wären evtl. Permafuses geeignet - Die müssen nicht bei jedem Auslösen ausgetauscht werden.
Günstige 2x16 Displays gibt's für unter 5,-€.
0,96" OLED für um 1,-€ bei eBay.
Librarys für beides sollten sich finden lassen.
SPI und TWI haben die Megas ja auch alle.
Das sind nur Vorschläge, realisier das bitte so wie es Dir am Besten passt!

 Zitieren
Zitieren



Lesezeichen