







Das kommt auf die Modellgröße an. Bei 50 bis 60cm Höhe habe ich etwa auf die Maße 10x23x12 mm gesetzt. Das lässt sich ganz gut unterbringen. Auch in Armen und Beinen. Viel größere Dinge passen da aber auch nicht hinein.
Zuletzt habe ich bemerkt, dass mein Drucker in der Z-Achse klemmt. Ich habe immer gedacht, der Schrittmotor schafft das, da habe ich mich aber geirrt. Jetzt läuft die Z-Achse offenbar gut und leicht und die Drucke haben Originalhöhe.Die Höhe spielt meist nur eine untergeordnete Rolle, und bei niedrigen Teilen ist die Abweichung nicht ganz so groß. Aber jetzt war das irgendwie auffällig, dass ich danach geschaut habe. Nun habe ich im CAD-Programm dieselbe Höhe, wie nach dem Druck. Schön, dass das auch mal übereinstimmt. Gerade bei so Sachen, wo dann ein Motor gerade hineinpasst ist das nicht ganz unwichtig. Proportionen sollen ja auch stimmen.
Mit den Motoren bin ich noch nicht so weit. Ich war noch bei den Gelenken. Und da noch mehr Rotationsrichtungen noch mehr Komplikationen bedeuten, habe ich mir erst einmal eine Denkpause eingeräumt. Ich muss zunächst Gelenke anordnen und noch den Körper zurecht schneiden. Gelenke und Außenhülle kann ich aber schlecht zusammen drucken, wegen Überhängen. Also drucke ich die Gelenke wohl extra und setze sie nachher in den Körper ein. Und bei Anordnung der Gelenke muss ich immer drauf achten, dass irgendwie die Möglichkeit besteht, auch einen Motor einer entsprechenden Größe anzubauen. Im Becken habe ich pro Bein 3 Gelenke, die dicht beieinander sitzen. Folgend ein Bild dazu.
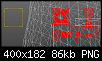
Der Würfel (gelb) links hat eine Kantenlänge von 10 mm. Die Gelenke für die einzelnen Richtungen muss ich wohl weiter auseinander setzen. Die neuen einrastenden Gelenke sind schon größer (Durchmesser 15 bis 18 mm), aber eben auch viel besser. Wenn die dann gut untergebracht sind, sollten später auch Motoren o.ä. an den Stellen passen. Zuerst hatte ich nur Gelenke für zwei Richtungen, das war ziemlich einfach und der Platz in der Außenhülle war genügend dafür. Nun müssen dort irgendwie drei Gelenke rein.






Lesezeichen