-
 Werbung
Werbung
-
Super-Moderator
Lebende Robotik Legende

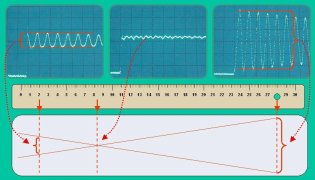
Die linke Kurve
Sie erscheint auf den ersten Blick ein bisschen schwierig zu interpretieren, aber sie lässt sich erstaunlich einfach aus den beiden anderen herleiten. Dazu betrachtet man zunächst die rechte Kurve bei der allein die Kippung des Sensors wirksam ist. Die gleiche Kippung ist in jeder Kurve eines am pendelnden Lineal befestigten Sensors in gleicher Größe wirksam.
Unterschiede ergeben sich damit nur durch die Größe des Anteils der Kraft, die von der beschleunigten Bewegung stammt. Diese ist an der Drehachse null und sie nimmt proportional mit dem Abstand von der Achse zu.
Der Punkt an dem sie genau so groß ist wie die Kraft die von der Kippung herrührt ist auch schon bestimmt worden: bei 8,4cm wo sich die Kräfte gerade aufheben. Man kann nun einfach aus Amplitude und Phasenlage der Schwingung die Position bestimmen. Die Phasenlage der Schwingung ist ja, wie man gleich zu Beginn nach dem Loslassen sieht, entgegengesetzt. Der Sensor war hier also an der Position beim Skalenwert 2cm.
Das ging dann wieder leicht.
Es ist noch zu beachten, dass die Kurven nicht gemeinsam aufgenommen wurden. Die Verschiebung des Sensors mit Halterung auf den Skalenwert 2cm hat eine Vergrößerung der Schwingungsdauer um 8% hervorgerufen. Man kann es bei genauem Hinsehen auch beim Vergleich der linken und der rechten Kurve erkennen. Bei der langsameren Schwingung ist auch die Beschleunigung um diesen Faktor geringer. Der Effekt wurde bei der grafischen Auswertung durch eine leicht erhöhte Linienbreite berücksichtigt.

Zwischen den beiden Kurven rechts und in der Mitte ergibt sich kein Unterschied in der Schwingungsdauer. Bei der Montage in der Nähe der Achse hat der Sensor kein merkliches Trägheitsmoment und im anderen Fall hat er als Teilsystem die gleiche Schwingungsdauer wie das Lineal ohne Sensor.
Manfred
 Berechtigungen
Berechtigungen
- Neue Themen erstellen: Nein
- Themen beantworten: Nein
- Anhänge hochladen: Nein
- Beiträge bearbeiten: Nein
-
Foren-Regeln
Werbung 








 Zitieren
Zitieren
Lesezeichen