







Hallo Zusammen,
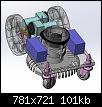
habe mal ein bissel weiter gemacht und mal den ersten Entwurf der Bodenwanne erstellt, es fehlen noch ein Paar Detail aber vom Prinzip finde ich die mal nicht schlecht.
Aus 3mm Stahl um etwas Gewicht zu bekommen. Die Motoren werden hinten noch einen Motor Aufschraub-block bekommen das die Kugellager unter den Motoren sitzen somit wird der Schwerpunkt nach unten verlagert.
Natürlich ist das nicht Ideal die Motoren über die Lager zu nehmen wegen der Wartungstauglichkeit, aber für nebeneinander in einer Linie ist kein Platz, also müssen sie irgendwie dran vorbei.
Aber Bilder sagen mehr als Worte.
Weis eigentlich jemand wie das mit den Schleifen die verlegt werden funktioniert und wie man einen Robi dran entlang fahren lassen kann?

 Zitieren
Zitieren

Lesezeichen