




 Zitieren
ZitierenWas meinst du mit Model?
Willst du die Übertragungsfunktion der ITn Strecke durch Parameterschätzung in Matlab/Simulink oder Scilab/Xcos nachbilden?
Gruß
witkatz

 Werbung
Werbung

Guten Abend,
ich möchte einen PID-Regler dimensionieren und wurde natürlich in der Wiki fündig
Jedoch kann ich die Faktoren eher weniger durch ausprobieren herausfinden.
Aus diesem Grund möchte ich auf eine Simulation zurückgreifen, weiß jedoch nicht genau wie ich das bewerkstelligen soll.
Es geht um die Regelung eines Antennenrotors, die Regelgröße ist die Position (Winkel).
Wie kann ich ein Model erstellen? Die Trägheit des Systems erhalte ich durch die Sprungantwort.
Würde diese Information reichen? Bei einem LTI System wäre es so, aber hier eher nicht.
Vielleicht mag mir jemand mit seinem Know How helfen.
PS: Im Titel sollte natürlich "einer" stehen
Beste Grüße, Kobal.
Geändert von Kolba (24.01.2016 um 22:34 Uhr)

Was meinst du mit Model?
Willst du die Übertragungsfunktion der ITn Strecke durch Parameterschätzung in Matlab/Simulink oder Scilab/Xcos nachbilden?
Gruß
witkatz
Korrekt.Willst du die Übertragungsfunktion der ITn Strecke durch Parameterschätzung in Matlab/Simulink oder Scilab/Xcos nachbilden?

Ich bekomme ein Sollwert gegeben. Das System (der Rotor) soll ja nun so schnell wie möglich den Istwert an diesen Sollwert anpassen.
Kontinuierliche Messungen werden genommen und fließen wieder in den Regler ein.
Diesen Regler möchte ich nun dimensionieren. Das Problem ist: Ich kann nicht alle Faktoren durchtesten.
Deswegen wollte ich von der Regelstrecke - dem System - ein Model bilden, um den Regler am Computer zu berechnen.
Die einzige "Eigenart" die dieses System von einem "perfekten System" unterscheidet ist doch die Trägheit, die Schwungmasse und die maximale Drehgeschwindigkeit?
Wie bekomme ich aber eine ungefähre Modelbeschreibung hin ohne mich mit den physikalischen Gesetzmäßigkeiten zu beschäftigen (Motor, Übersetzung etc.)?
Ich dachte da an die Sprungantwort, da ich mit dieser ein LTI-System hinreichend berechnen kann.
Mit dieser würde ich jedenfalls die Anlaufzeit (Trägheit), die maximale Drehgeschwindigkeit und die "Schwung" (durch die bewegte Masse müsste sich der Rotor selbst nach ausschalten noch ein bisschen weiterdrehen) herausfinden können, oder? Dieses System könnte ich dann unter Simulink nachbilden.
Sehe ich das richtig?
Geändert von Kolba (25.01.2016 um 01:21 Uhr)

Das läuft doch nur darauf hinaus, die Differentialgleichung dieser Bewegung zu lösen. Ist halt wohl eine DGL höherer Ordnung, sicher partiell und inhomogen. Ne ähnliche Aufgabe hatte ich mal bei nem mehrgängigen Schwinger mit Zwangserregung gelöst. Ist also wohl machbar, aber wirklich nicht ganz ohne, insbesondere eben der nichtlineare Teil.Zitat von Kolba

Unklar ist mir, wieso Du die die Dimensionierung der Regelparameter nicht durch die Sprungantwort und eine konstante Testfahrt machst. Im R N Wissen hat waste ne tolle Abhandlung über Regelungstechnik geschrieben. Darin geht er auf die Modellbildung in Simulationsprogrammen ein, beschreibt aber auch ausführlich eine beispielhafte Realisierung mit digitalem Regler. Viel besser als in diesen zugegebenermassen länglichen Ausführungen kann Dir wohl hier, in einem speziellen Thread, nicht geholfen werden.
Ich hatte jedenfalls meine kümmerlichen Reste der schulischen Regelungstechnik bei ihm aufgefrischt und einen hübschen PID für den Antrieb von meinem beiden (teil)autonomen Dosen geschrieben. Die fahren dadurch mit ihren zwei völlig unabhängigen Antrieben auf 1 m linearem Weg üblicherweise mit Abweichungen von unter fünf Millimetern, manchmal deutlich weniger. Dank waste *gg*
Ciao sagt der JoeamBerg
Genau so wollte ich es ja machen. Aus dem Matheunterricht weiß ich jedoch noch: Die Sprungantwort lässt nur auf das System schließen, sofern das System ein LTI-System ist - was ich mit Sicherheit nicht habe. Deswegen bin ich mir nicht sicher ob die Sprungantwort für eine einigermaßen gute Modellbildung reicht. Ich habe selbst mal einen Regler ausgelegt, aber dieser war im linearisierten Bereich eines Wassertankmodels. Ich bin mir nicht ganz sicher wie ich das auf die jetzige Aufgabe übertragen kann.Unklar ist mir, wieso Du die die Dimensionierung der Regelparameter nicht durch die Sprungantwort und eine konstante Testfahrt machst.
Sicherheit ist immer beruhigend, selbst wenns eine nur gedachte, irreale ist... Sprungantwort .. sofern das System ein LTI-System ist - was ich mit Sicherheit nicht habe ..
Einer meiner liebsten Autoren hat in sein Vorwort geschrieben, dass die Beherrschung der Mathematik sich darin zeigt, wieweit man ihre vielfältigen und tiefreichenden Möglichkeiten vermeidet (vermeiden kann *gg*). Die Anwendung davon, die weit vor diesem klugen Spruch erschien, ist z.B. die Einfachheit der Festigkeitslehre, die nur davon lebt, dass man beim bekanntermaßen aufwendigen physikalischen Modell alle höheren Ableitungen vermeidet(vernachlässigt). Und dass das unlösbare Dreikörperproblem die immer noch nicht geschlossen lösbare Aufgabe z.B. eines Mond-Rendevous verbietet ist auch überholt, denke ich.
Ich würde mir an Deiner Stelle überlegen, wo die Invarianzen Deines Antennenrotors liegen. Klar, bei zu schneller Drehung demontiert sich das Eine oder Andere, dann wirds inhomogen. Sollte aber eben vermieden werden. Es dürften die Windlasten bleiben - vom Lichtdruck gegen den Hebelarm der Antenne will ich mal absehen sowie vom zeitvarianten Strahlungsdruck der umgebenden elektromagnetischen Inhomogenitäten. Und relativistische Zeiteinflüsse sehe ich auch nicht. Was übrig bleibt ist dann doch handhabbar. Oder erklär doch mal bitte Deine zeitlichen Varianzen. Aus Deiner Aussage spricht ja Deine Sicherheit, dass die existieren . . .
Ciao sagt der JoeamBerg
Ich habe nicht gesagt, dass es zeitvariant ist?
Bei meinem System y = T(t) ist T doch ein nichtlinearer Operator oder?
Das Drehmoment ist doch = Trägheitsmoment * Winkelbeschleunigung.
Daran ist doch nichts linear, oder wo ist mein Fehler?
Das ist ja mein Problem. Was ist bei Dir nichtlinear? Ich weiß ja nichtmal was Du hinter dem "T" versteckt hast... Daran ist doch nichts linear ..
Vermutlich liegts an meinem beschränkten Wissen über den Umgang mit Modellen und Simulationen und ich kann Dir weder folgen noch raten.
Ciao sagt der JoeamBerg
hmm okay.
Vermutlich sehe ich etwas falsch und habe natürlich im ersten Post nicht meinen kompletten Gedankengang offen gelegt:
Der Rotor treibt ja eine Antenne an. Diese ist relativ schwer (100 kg). Die Motoren müssen dieses Gewicht doch erst in Schwung bringen, wodurch sich dieser Verlauf ergeben würde:
1. Anlaufphase
2. Lineare Phase (max. Winkelgeschwindigkeit erreicht. ~linear).
3. Bremsphase (wenig Überschwingen).
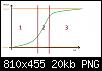
Klingt das so pausibel oder bin ich auf dem Holzweg?
 Berechtigungen
Berechtigungen

Lesezeichen