-

-
Erfahrener Benutzer
Robotik Einstein

-
Erfahrener Benutzer
Lebende Robotik Legende

Herzlichen Dank dafür ! 
Ich habe dort aber mehr Details über verwendete Elektronik erwartet ._.
MfG
(Mit feinem Grübeln) Wir unterstützen dich bei deinen Projekten, aber wir entwickeln sie nicht für dich. (radbruch) "Irgendwas" geht "irgendwie" immer...(Rabenauge) Machs - und berichte.(oberallgeier) Man weißt wie, aber nie warum. Gut zu wissen, was man nicht weiß. Zuerst messen, danach fragen. Was heute geht, wurde gestern gebastelt. http://www.youtube.com/watch?v=qOAnVO3y2u8 Danke! 
-
Super-Moderator
Lebende Robotik Legende

Hier wird die Konfiguration mit stärkerer Kopplung der Magnete gezeigt.
http://www.ebay.com/itm/120729753179...%3AMEBIDX%3AIT
Hier ist eine Bauanleitung für die Elektronik mit niedriger Spannung.
http://nutsvolts.texterity.com/nutsv...?folio=32#pg32
-
Erfahrener Benutzer
Lebende Robotik Legende
Oh Man(f) !
Warum musst du immer etwas für mich interessantes posten ?
Ich habe schon überlegt, ob ein Solarpendel als Antrieb für meinen künstlichen Tier nicht besser als Mikrostepper für Instrumente wäre, der sich schon mit 2 mA bewegt. Das muss ich unbedingt zum Experimentieren kaufen, weil so billig ist.
Aber vor dem Kauf muss ich zumindens per e-mail versuchen zu fragen wie groß es ist und welchen Widerstand die Spule hat. Das wichtigste wäre aber, ob es unter mechanischer Belastung von alleine startfähig ist, was ich stark bezweifle. 
Die Schaltung aus zweiten Link ist noch zu kompliziert, weil in dem chinesischem Spielzeug z.B. keine LED gibt. Ich werde doch meine Vermutung realisieren und ausprobieren müssen. 
Geändert von PICture (19.08.2015 um 10:31 Uhr)
MfG
(Mit feinem Grübeln) Wir unterstützen dich bei deinen Projekten, aber wir entwickeln sie nicht für dich. (radbruch) "Irgendwas" geht "irgendwie" immer...(Rabenauge) Machs - und berichte.(oberallgeier) Man weißt wie, aber nie warum. Gut zu wissen, was man nicht weiß. Zuerst messen, danach fragen. Was heute geht, wurde gestern gebastelt. http://www.youtube.com/watch?v=qOAnVO3y2u8 Danke!
-
Super-Moderator
Lebende Robotik Legende
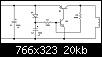
So groß ist der Unterschied nicht, es wird auch nach dem Prinzip des UJT geschaltet. Hier wurde der Kollektor von Q1 nicht direkt mit der Basis von Q2 verbunden sondern über R2.
Beim Durchschalten fließt der Kollektorstrom von Q2 im wesentlichen über die Spule und es wird nur eine Transistorsättigungsspannung abgezogen. Beim klassischen UJT bleibt eine Schwellspannung und eine Sättigungsspannung als Spannungsabfall am UJT als Schalter.
Geschaltet wird bei ausreichend hoher Spannung über R1 und synchronisiert über R2 mit der vom bewegten Magneten in der Spule induzierten Spannung.
http://www.ibiblio.org/kuphaldt/elec...mi/SEMI_7.html
-
Erfahrener Benutzer
Lebende Robotik Legende
Danke für den erfrischenden Lehrgang !
"Deine" Schaltung sollte effektiver als die von mir vermutete "chinesische" ohne Synchronisation sein. Ich werde aber zuertst "meine" aufbauen, ausprobieren und mit oririnaler vergleichen.
Der Affe mit "meiner" Schaltung hat sich gar nicht bewegt. Die originale Schaltung muß also schon mit Synchronisation und Selbstanschwingen sein. Jetzt verstehe ich es schon gut und muß zugeben, dass ich mir das zu einfach vorgestellt habe. Die chinesische Schaltung hat zwar nur ein Elko, müsste aber viel komplizierter sein (wahrscheinlich sogar mit µC).
Geändert von PICture (27.08.2015 um 18:28 Uhr)
MfG
(Mit feinem Grübeln) Wir unterstützen dich bei deinen Projekten, aber wir entwickeln sie nicht für dich. (radbruch) "Irgendwas" geht "irgendwie" immer...(Rabenauge) Machs - und berichte.(oberallgeier) Man weißt wie, aber nie warum. Gut zu wissen, was man nicht weiß. Zuerst messen, danach fragen. Was heute geht, wurde gestern gebastelt. http://www.youtube.com/watch?v=qOAnVO3y2u8 Danke!
-
Super-Moderator
Lebende Robotik Legende
Nur der Vollständigkeit halber: Die von Dir gezeichnete Schaltung hat auch eine Synchronisation. Die Spule liegt in Reihe mit dem UJT an der Spannungsquelle und eine Spannungsschwankung in der Spule (hervorgerufen durch den bewegten Magnet) wird das Durchschalten des UJT auslösen.
Der Effekt wird wie gesagt bei der kleinen Spule recht schwach sein was zu einer etwas unsauberen Schwingung des Pendels führt.
 Berechtigungen
Berechtigungen
- Neue Themen erstellen: Nein
- Themen beantworten: Nein
- Anhänge hochladen: Nein
- Beiträge bearbeiten: Nein
-
Foren-Regeln










 Zitieren
Zitieren
Lesezeichen