








hallo allerseits,
im zuge der arbeiten an meiner raumnavigation ergab sich die idee eines IR-US sensors, der drehbar an einem servo angebracht ist. So könnte man eine IR-bake anpeilen und dann auch die entfernung zu ihr messen, ohne den ganzen roboter drehen zu müssen...
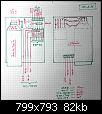
Nur der servo wird noch extra mit strom versorgt, die Sensoren mit einer gemeinsamen versorgung. Liesse sich auch noch ändern...
Verwendbar auch für SRF02 (andere verdrahtung als auf den bildern zu sehen - bei mir wäre es zu der multiIO), für hc-sr04 (für mich eine gute alternative zu SRF02) und für eine erweiterte verwendung des IR-empfängers des RP6 (dessen OUT-signal habe ich auf der BASE an den USR-BUS gelegt, damit es überall zur verfügung steht...






 Zitieren
Zitieren




Lesezeichen