







Hallo zusammen,
ich bin gerade dabei einen PI-Drehzahlregler für einen kleinen 6V DC-Motor zu entwickeln und bin dabei auf Verständnisprobleme gestoßen, die ich alleine
nicht lösen kann.
Zur Ansteuerung: Der Motor wird über eine 16-Bit PWM angesteuert (jedoch nicht die volle Breite, Steuerbereich 0-7485 dezimal) und die Geschwindigkeit/Drehzahl per Gabellichtschranke
und Encoderscheibe gemessen.
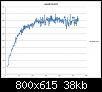
Um Paremeter der Strecke zu finden habe ich eine Sprungantwort aufgenommen. Im Betrieb will ich diese Werte glätten(mitteln).
Die Sprunghöhe war hier 80% vom Maximum, also ein PWM-Wert von 5988 bzw. ~4,8V. Zeitachse in ms.
Wo ich jetzt Hauptsächlich durcheinander komme sind die verschiedenen Möglichkeiten des Ist-/Sollwertvergleichs und der Stellgröße y.
Ich würde gerne den Sollwert als Geschwindigkeit in mm/s vorgeben, so wie ich es auch in der Sprungantwort-Aufzeichnung angegeben habe. Nun füttere ich ja den Regler
mit der Geschwindigkeit, was spuckt mir denn dann die Stellgröße aus? Wie komme ich auf einen PWM-Wert bei der Stellgröße?
Muss ich ich die Geschwindikeit erst in eine Drehzahl o.Ä. umrechnen ?
Hier hängts sehr bei mir.
Noch eine Frage zum Regler:
esum = esum + e
y = Kp * e + Ki * Ta * esum
Bei einer Regelabweichung von 0 wird die Stellgröße ja ebenfalls 0, ich denke hier müsste ich die Stellgröße jeweils zum aktuellen PWM-Wert hinzuaddieren, richtig?
Ich hoffe mir wird geholfen
Grüße

 Zitieren
Zitieren





Lesezeichen