




 Zitieren
ZitierenDann mach die Füße kürzer und spar dir das Gewicht! Im Moment verschenkst du 20mm ohne Nutzen!




Wenn ich mehr Bodenfreiheit wollte dann hätte ich die Beine länger gemachen. Der Unterschenkel ist mit Fußspitze jetzt 125mm lang. Und für meinen Geschmack damit schon etwas zu lang - nicht das ich im allgemeinen was gegen lange Beine habe ...Zitat von HannoHupmann

- Aber alleine durchs drehen würde das Bein im 20mm länger werden.
Ich finde das muss nicht sein - hier eher 20mm kürzer.

Dann mach die Füße kürzer und spar dir das Gewicht! Im Moment verschenkst du 20mm ohne Nutzen!
Hanno, ich kann mich mit der Idee irgendwie nicht anfreunden.
Es zerstört 1. das schöne Design ...und 2. und viel wichtiger kann ich dann die Servos nicht mehr übereinander fahren. Dazu müsste ich wieder den Oberschenkel verlängern oder auch die dazu gehörenden Servos umdrehen. Wenn ich die Füße kürze, wo bleibt dann Dein erster Einwand mit mehr Bodenfeiheit?
Wieviel Gewicht verschwende ich denn - 5g pro Bein?!
Dass das in dem Bauzustand überhaupt nicht mehr in Frage kommt sollte Dir als langjähriger erfahrener Hexapodbauer klar sein.
Viele Grüße
Jörg
Geändert von HeXPloreR (12.04.2015 um 13:50 Uhr)
Zum Design sag ich nichts.
"Übereinander fahren" müsste trotzdem gehen, nur vielleicht nicht ganz so eng.
Die Füße kürzen bezog sich natürlich auf deinen Anspruch, den Körper nicht so hoch zu setzen.
Ich denke es dürften mehr als 5g sein, vermutlich eher 10g. Das wären dann schon knapp 2Ncm die man an der Schulter einsparen kann. Viele kleine Einsparungen von wenigen Gramm machen es am Ende aus.
Allerdings ist es weniger die reine Gewichtsersparnis die bei den Beinen entscheidend ist. Vielmehr reduziert sich damit auch die Massenträgheit und die stört beim schnellen Laufen gewaltig.
Als langjähriger Hexabotbauer ist mir klar, dass ich das Design zu JEDER Zeit komplett Ändere, wenn es mir einen Vorteil bringt.
Vielleicht hast du meine Threads nicht genau in erinnerung, aber sowohl beim Phoenix, als auch bei meinem Vinculum habe ich die Konstruktion der Beine noch sehr, sehr oft verändert, obwohl der Hexa bereits komplett fertig war.
Wo hatte ich denn aktuell überhaupt ein Problem der Bodenfreiheit angesprochen? Kannst Du dazu bitte kurz zitieren woher Du das hast.
Und schnelles laufen? - laufen irgendwann irgendwie ja, aber schnelles. Soweit ich meine Threads kenne habe ich schon bei der Planung des Designs diesen Aspekt "des schnellen laufens" berücksichtigt und somit nicht geplant.
Aber man ändert nicht in einer Phase der Programierung nochmals einen Aufbau der keiner Änderung bedarf.
Als langjähriger Hexabotbauer ist mir klar, dass ich das Design zu JEDER Zeit komplett Ändere, wenn es mir einen Vorteil bringt.
Vielleicht hast du meine Threads nicht genau in erinnerung, aber sowohl beim Phoenix, als auch bei meinem Vinculum habe ich die Konstruktion der Beine noch sehr, sehr oft verändert, obwohl der Hexa bereits komplett fertig war.
Wenn es um ein mechanisches Problem ginge, würd ich Dir recht geben. Aber da die Beine nicht bautechnisch mechanisch überladen sind ist auch keine Korrektur am Material nötig.
Soweit ich noch weiß hattest Du erhebliche Problem mit den von Dir geplanten Beinen in der Umsetzung.
Bei Detailverbesserung oder Erweiterung der Funktionalität behalte ich mir selbstverständlich vor betroffen Teile neu zu planen.
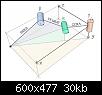
Ich habe hier übrigens irgendwo ein schönes Bild gefunden das alle relevanten Daten der IK des Beinse ab der Hüfte auch sehr gut darstellt:
Geändert von HeXPloreR (12.04.2015 um 17:18 Uhr)
Die Anforderung habe ich nicht aus deinem Thread, das ist einfach eine generelle Anforderung, allerdings je nach Hexabot mehr oder weniger wichtig. Fakt ist einfach, dass du mit der Konstruktion im Moment unnötiges Material herumträgst, dass sich auf das Gesamtgewicht und die Massenträgheit auswirkt. Zudem könnte man durch drehen des Fußservos die Fußlänge verkürzen, bei gleichbleibender Bodenfreiheit. Dies hat den Vorteil, dass die Füße stablier werden. Unterm Strich habe ich eine Optimierung aufgezeigt, die mir aufgefallen ist. Umsetzen muss man sie nicht, man könnte es.
Hallo Roboterfreunde,
jetzt funktioniert die Körperdrehung um die X- und Y-Achse endlich zufriedenstellend. Das von mir erwähnte "Schiebe-Problem der Mittelbeine" ist hier nicht mehr zu beobachten.
Ich habe nun aus der Drehung der X-Achse das "hy" und das "hx" der Y-Achse als tangenzialen Bezug zur x- und y-Koordinate des Fußpunktes aus dem Robotermittelpunkt. Hier wird nun hx und hy jeweils auf die Ursprungshöhe "Tz" addiert oder subtrahiert.
Um die Drehung des Körpers von den Beinen weiter abzukoppeln, wird der Cosinus des Winkels mit den jeweiligen Körperlängen verrechnet und das Ganze anschliessend von den Koordianten des Fußpunkts abgezogen.
Die unter anderem hieraus entstehenden Werte für x-, y- und z-Koordinate des Fußpunktes fliessen dann direkt als Übergabewert in die inverse Kinematik ein.
Die Drehung der Z-Achse habe ich dabei irgendwie vernachlässigt. Kommt die Tage aber sicher dazu.
Die Überlegungen dazu sind gemacht und müssen noch programmiertechnisch umgesetzt werden.
Viele Grüße
Jörg
Hey,
ich habe nun die Facedetection auf dem RasPi-2 mit einer WEB-Cam am laufen. Es wird jetzt etwa zwischen 28 - 35ms ein Gesicht gefunden. Das wären dann etwa 35 - 28Fps. Die Auslastung der CPU's wird mit 20 - 30% angezeigt. Ich finde damit lässt es sich gut leben.
Jetzt muss das Ganze noch in den OpenCm9 per UART übertragen werden. Und der muss es auswerten.
Viele Grüße
Jörg
Geändert von HeXPloreR (23.04.2015 um 20:13 Uhr)
Hallo an alle Mitlesenden,
nun ist der Kopf von "IKU" per Facedetection steuerbar. Die Steuerung ist zwar noch nicht ganz ausgereift, aber prinzipiell funktioniert's.
Jetzt kann ich mich daran machen den Körper einzubinden, damit Dieser auch leichte Bewegungen mit ausführt.
Viele Grüße
Jörg
Geändert von HeXPloreR (02.05.2015 um 10:45 Uhr)
Hallo Malte,
ich habe die zwei defekten Boards heute getauscht bekommen. Das dritte der Reihe tut seinen Dienst, in der gleichen Umgebung wie die Anderen auch hätten tun sollen, immer noch ganz brav.
Viele Grüße
Jörg
 Berechtigungen
Berechtigungen

Lesezeichen