Der Quellcode ist ein Auszug aus meinen anderen Projekten, wo der Raspbi mit AVRs kommuniziert.
Witzigerweise läuft Dein oben angegebener Befehl (stty -F ttyAMA0 -a) bei meinen beiden Raspbis gar nicht.
Der erste sagt:
Code:
stty: ttyAMA0: Inappropriate ioctl for device
Der zweite sagt:
Code:
stty: ttyAMA0: No such file or directory
Beide "Systeme" arbeiten aber einwandfrei. Evtl. hast Du noch andere Pakete installiert?
Die Ausgabe von
Code:
stty -F /dev/ttyAMA0 -a
Auf dem ersten:
Code:
root@raspberrypi ~ > stty -F /dev/ttyAMA0 -a
speed 19200 baud; rows 0; columns 0; line = 0;
intr = <undef>; quit = <undef>; erase = <undef>; kill = <undef>; eof = <undef>; eol = <undef>; eol2 = <undef>; swtch = <undef>;
start = <undef>; stop = <undef>; susp = <undef>; rprnt = <undef>; werase = <undef>; lnext = <undef>; flush = <undef>; min = 1; time = 0;
-parenb -parodd cs8 -hupcl -cstopb cread clocal -crtscts
-ignbrk -brkint ignpar -parmrk -inpck -istrip -inlcr -igncr -icrnl -ixon -ixoff -iuclc -ixany -imaxbel -iutf8
-opost -olcuc -ocrnl -onlcr -onocr -onlret -ofill -ofdel nl0 cr0 tab0 bs0 vt0 ff0
-isig -icanon -iexten -echo -echoe -echok -echonl -noflsh -xcase -tostop -echoprt -echoctl -echoke
und auf dem zweiten, welcher von Grund auf neu eingerichtet wurde:
Code:
speed 19200 baud; rows 0; columns 0; line = 0;
intr = <undef>; quit = <undef>; erase = <undef>; kill = <undef>; eof = <undef>; eol = <undef>; eol2 = <undef>; swtch = <undef>;
start = <undef>; stop = <undef>; susp = <undef>; rprnt = <undef>; werase = <undef>; lnext = <undef>; flush = <undef>;
min = 1; time = 0;
-parenb -parodd cs8 -hupcl -cstopb cread clocal -crtscts
-ignbrk -brkint ignpar -parmrk -inpck -istrip -inlcr -igncr -icrnl -ixon -ixoff -iuclc -ixany -imaxbel -iutf8
-opost -olcuc -ocrnl -onlcr -onocr -onlret -ofill -ofdel nl0 cr0 tab0 bs0 vt0 ff0
-isig -icanon -iexten -echo -echoe -echok -echonl -noflsh -xcase -tostop -echoprt -echoctl -echoke
Edit:
Also bis auf die Geschwindigkeit, Zeilen und Spalten identisch.
Edit:
Hast du vielleicht einen Kurschluß oder niederohmige Verbindung zwischen TX und RX?
- - - Aktualisiert - - -
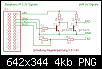
Wie ist die Hardware aufgebaut? Die Pegel sind angepasst? Feine Brücken zwischen TX und RX ausgeschlossen? Auch nicht durch zu niedrigohmige Widerstände miteinander verbunden?
Anbei der von mir genutzte Pegelwandler.








 Zitieren
Zitieren



Lesezeichen