-
 Werbung
Werbung
-
Erfahrener Benutzer
Begeisterter Techniker
-
Erfahrener Benutzer
Roboter Genie
Wie schwer ist er insgesamt?
-
Erfahrener Benutzer
Begeisterter Techniker
Sorry aber irgendwie lassen sich keine Attatchments einfügen...
Gibt es da einen besonderen Trick oder warum geht das nicht mehr.. hat doch sonst immer funktioniert.
-
Erfahrener Benutzer
Roboter Genie
zu groß?
lad sie irgenbdwo anders hoch und verlink es
-
Erfahrener Benutzer
Begeisterter Techniker
So hab es jetzt über die Gallery gemacht. Hoffe er gefällt euch.
Gruß Jan
-
Erfahrener Benutzer
Begeisterter Techniker
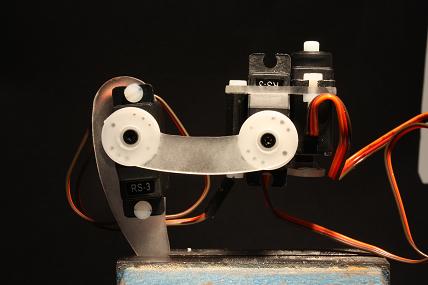
Er wiegt mit Elektronik bisher 575g und ist mit einen knapp 22cm lang. Der Körper ist ca. 13x11x5cm (LxBxH) und der Ober- und Unterschenkel sind jeweils 4cm Lang (Unterschenkel: vom Ende bis zur Drehachse; Oberschenkel: zwischen den Drehachsen).
Ach aurdem hatte ich wärend der Planung auch ein Exel-Tabelle angelegt, die die einzelnen Beinbewegungen (für jedes einzelne Bein) berechnet. Eine für gerade Bewegung und eine für Kurvenlauf mit einem bestimmten Radius. Muss zugeben das die Kinematik kleine Tücken hatte. Anhand der Berechneten Schrittweiten und Winkel habe ich den Roboter dimensioniert und die optimale Beinlänge rausgesucht. Am Ende der Planungsphase hatte ich dann eine große Exel-Tapete wo alle Rechnungen ineinander griffen, so dass ich nur die Beinlänge oder die Schrittweite ändern muste und sofort alle Bewegungsabläufe und Schrittweiten hatte. Außerdem wurde ür alle Servos überprüft ob sie unter diesen Bedingungen das Gewicht halten können, wodurch die Auswahl erheblich erleichtert wurde.
Gruß Jan
-
Erfahrener Benutzer
Roboter Genie
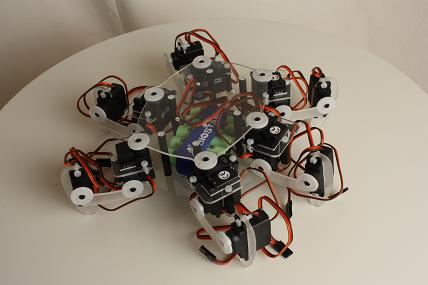
Bin schon aufs erste Video gespannt
-
Erfahrener Benutzer
Begeisterter Techniker
So nun funktioniert auch meine Platine richtig und somit kann ich endlich voll durchstarten mit der Programmierung. Wie so oft gab es da auch schon erste Probleme mit der parallelen PWM-Erzeugung. Ich sehe mir im mom Bsp.-Codes von anderen Bastern an und hoffe bald eine gute Lösung zu finden.
-
Moderator
Robotik Einstein

Das Problem ist immer, dass man mit nem Megae32 nur eine begrenzte Anzahl Servos ansteuern kann.
-
Erfahrener Benutzer
Roboter-Spezialist
Der sieht gut aus

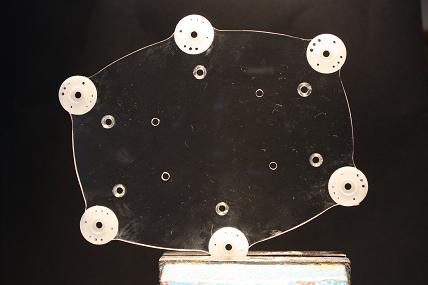
Wie hast Du die Kunststoffteile hergestellt?
Grüße,
Crypi
 Berechtigungen
Berechtigungen
- Neue Themen erstellen: Nein
- Themen beantworten: Nein
- Anhänge hochladen: Nein
- Beiträge bearbeiten: Nein
-
Foren-Regeln
Werbung 





 Zitieren
Zitieren






Lesezeichen