-
 Werbung
Werbung
-
Erfahrener Benutzer
Robotik Einstein

Auch die PWM Routine ist fertig und läuft auf dem Controller zufrieden stellend.
Übrigens das ist das Controllerboard, das schon längere Zeit fertig ist:
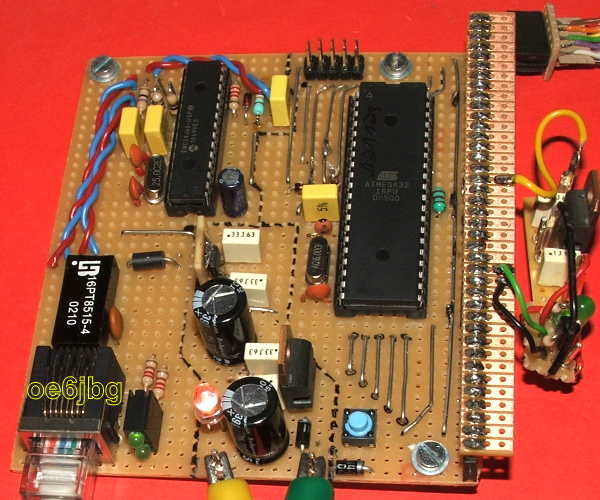
Die Hallsensoren für Bumper, Taster und Odometrie sind bereits gekauft und müssen noch getestet werden.
Auch das Entwickeln eines Liniensensors soll bald folgen.
 Berechtigungen
Berechtigungen
- Neue Themen erstellen: Nein
- Themen beantworten: Nein
- Anhänge hochladen: Nein
- Beiträge bearbeiten: Nein
-
Foren-Regeln
Werbung 








 Zitieren
Zitieren
Lesezeichen