-
 Werbung
Werbung
-
Erfahrener Benutzer
Robotik Einstein

Bamolifo
Hallo,
jetzt starte ich mal ein neues Projekt: Basismodul Line Follower, kurz: Bamolifo.
Zweck des Unternehmens, ist, eine Basis zu haben, auf der aufbauend die verschiedensten Module zur autonomen Fahrzeugtechnik entwickelt und getestet werden können.
Randbedingung des Projekts ist: ich habe kaum Zeit dafür. Darum soll in der Startphase der Arbeitsaufwand möglichst gering sein.
Mikrokontroller soll zumindest zunächst ein Atmega32 sein. Liniensensor und Bumper sind klar.
Auf drei Rädern soll es fahren. Antrieb mit 1 DC Motor und Getriebe vorne, Lenkung mit Modellbau Servo vorne.
An die Hinterräder kommt später die Odometrie.
Servo ist vorhanden, Getriebemotor ist zu suchen, Bordspannung wahrscheinlich ca 6-7V.
Bedienung: Zunächst nur Start und Stop.
-
Erfahrener Benutzer
Robotik Einstein
Antriebs Getriebemotor ist gekauft, für später auch ein zweites Exemplar: 6 - 12 V, ca 80 - 420mA und 60 RpM bei 12V unter Last. Das sollte auch für später gut ausreichen.
Auch die Räder gibt es bereits einschliesslich 4. Rad für eine 4 Rad Variante.
Für die Servoansteuerung habe ich die Timer Daten durchgesehen. Das ist zunächst recht unübersichtlich, aber im Datenblatt steht alles.
Die Berechnungsformeln sind mit einem einfachen LED Blinkprogrammm getestet und OK.
Fürs Servo hab ich mal angesetzt:
Servoimpulse durch 8Bit Timer:
Pause:
1 / 16e6 * 1024 * 256 = 16.32 ms
Minimal und Stellbereich je:
1 / 16e6 * 64 * 250 = 1 ms
ausreichend aufgelöst
So verbrauche ich nur einen 8 Bit Timer und habe nur 3 Interrupts pro Periode.
-
Erfahrener Benutzer
Robotik Einstein
Die Interrupt Routine für das Stellen des Servo ist fertig gestellt und funktioniert gut. Mal sehen, an welcher Ecke weiter entwickelt werden soll.
-
Erfahrener Benutzer
Robotik Einstein
Für die Motoransteuerung reicht vorerst 1 Quadrant.
Ein 55N03L Logic Level Enhancement Mosfet sollte da recht gut funktionieren, mit viel Leistungsreserve, da hab ich einige herumliegen.
-
Erfahrener Benutzer
Robotik Einstein
Die Motorschaltstufe hab ich jetzt mit einem D1802 aufgebaut.

Läuft, und die Werte passen: rechts Motorstrom in A, links Steuerstrom in mA.
-
Erfahrener Benutzer
Robotik Einstein
Auch die PWM Routine ist fertig und läuft auf dem Controller zufrieden stellend.
Übrigens das ist das Controllerboard, das schon längere Zeit fertig ist:
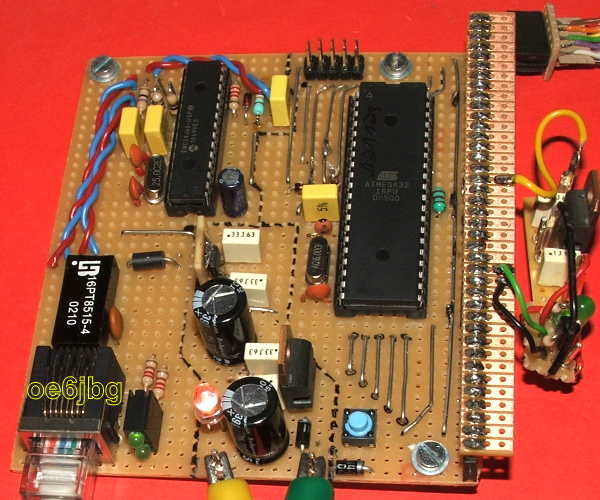
Die Hallsensoren für Bumper, Taster und Odometrie sind bereits gekauft und müssen noch getestet werden.
Auch das Entwickeln eines Liniensensors soll bald folgen.
-
Erfahrener Benutzer
Robotik Einstein
Die Hallsensoren sind ausreichend empfindlich. Sie sprechen auf schwache Büromagnete und durch Influenz magnetisierte Eisenteile in relativ grosser Entfernung an. Die open Collector Ausgänge können Eingänge mit internen Pullups auf Low ziehen.
-
Erfahrener Benutzer
Robotik Einstein
Zu den Liniensensoren stelle ich gerade Überlegungen an, wie diese durch gepulste LEDs, Synchronverstärkung und Synchrondemodulation unter allen Umständen zuverlässig gemacht werden können. Lichtschutz Röhrchen alleine sind mir da zu wenig. Wechselnde Untergründe und Beleuchtungen so wie unebener Boden sollten nicht stören.
-
Erfahrener Benutzer
Robotik Einstein
Nun hab ich in einer Simulation Bandpassfilter, Synchrongleichrichtung Tiefpass und Komparator aneinander gehängt und siehe da, das Ergebnis ist für einen ersten Versuch erstaunlich.

Das Einschalten des Nutzsignals unter den viel grösseren Störsignalen wird klar erkannt.
Es zeigt sich, dass die Synchrondemodulation nach dem Bandpass noch eine wesentliche Verbesserung bringt. Die Schaltung ist noch nicht wirklich gut ausgearbeitet, sondern stellt eher einen Proof of Concept dar. Da ist noch etwas Optimierungsspielraum drin.
 Berechtigungen
Berechtigungen
- Neue Themen erstellen: Nein
- Themen beantworten: Nein
- Anhänge hochladen: Nein
- Beiträge bearbeiten: Nein
-
Foren-Regeln
Werbung 







 Zitieren
Zitieren
Lesezeichen