







Das sieht auf dem Oszi jetzt mit dem Code:
so aus:Code:void getIR(void) { I2CTWI_transmitByte_RepeatedStart(0x55<<1,0x07); uint8_t irmsb = I2CTWI_readByte(0x55<<1); //[...] Weitere Bearbeitung der Variablen, keine weiteren Abfragen }
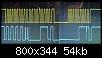
Das sind aber keine zwei Starts, oder?
Grüße
teamohnename
EDIT:
Müsste man also bei task_i2c eine neue else if Abfrage und einen neuen TWI TRANSMISSION STATE hinzufügen, der dann in der neuen Frage abgefragt wird? Also z.B.
Wo muss dann TWI_operation auf 4 gesetzt werden? In einer Read Funktion?Code://in RP6I2CMasterTWI.h #define I2CTWI_REQUEST_BYTES_REP_START 4 //in task_i2c else if (TWI_operation == I2CTWI_REQUEST_BYTES_REP_START) { no_rep_start = 1; I2CTWI_delay(); TWI_msgSize = I2CTWI_request_size + 1; I2CTWI_request_adr = I2CTWI_request_adr | TWI_READ; I2CTWI_buf[0] = I2CTWI_request_adr | TWI_READ; TWI_statusReg.all = 0; TWCR = (1<<TWEN)|(1<<TWIE)|(1<<TWINT)|(0<<TWEA)|(0<<TWSTA)|(0<<TWSTO); TWI_operation = I2CTWI_READ_BYTES_FROM_BUFFER; }
EDIT2:
Wir kommen gerade überhaupt nicht weiter... Wir glauben auch nicht wirklich, dass das irgendetwas mit einem zweiten Start zu tun haben könnte...
Was muss jetzt genau wo ergänzt werden? Ist wenigstens unser Ansatz richtig?
Sorry für die Nerverei... Aber anders kommen wir nicht weiter, die ganze RP6 Lib ist ohne diese Erklärungen viel zu komplex für uns...
EDIT3:
Unser task_i2c sieht bis jetzt so aus:
Alles Fett gedruckte haben wir geändert.
Das ist unsere Transmit Funktion:Code:void task_I2CTWI(void) { if (!I2CTWI_isBusy()) { if (TWI_statusReg.lastTransOK) { if(TWI_operation) { if(TWI_operation == I2CTWI_SEND_REGISTER) { I2CTWI_delay(); TWI_msgSize = 2; I2CTWI_buf[0] = I2CTWI_request_adr; I2CTWI_buf[1] = I2CTWI_request_reg; TWI_statusReg.all = 0; TWCR = (1<<TWEN)|(1<<TWIE)|(1<<TWINT)|(0<<TWEA)|(1<<TWSTA)|(0<<TWSTO); if(no_rep_start == 1) { TWI_operation = I2CTWI_REQUEST_BYTES; } else { TWI_operation = I2CTWI_REQUEST_BYTES_REP_START; } } else if (TWI_operation == I2CTWI_REQUEST_BYTES_REP_START) { I2CTWI_delay(); TWI_msgSize = I2CTWI_request_size + 1; I2CTWI_request_adr = I2CTWI_request_adr | TWI_READ; I2CTWI_buf[0] = I2CTWI_request_adr | TWI_READ; TWI_statusReg.all = 0; no_rep_start = 1; TWCR = (1<<TWEN)|(1<<TWIE)|(1<<TWINT)|(0<<TWEA)|(0<<TWSTA)|(0<<TWSTO); TWI_operation = I2CTWI_READ_BYTES_FROM_BUFFER; } else if (TWI_operation == I2CTWI_REQUEST_BYTES) { I2CTWI_delay(); TWI_msgSize = I2CTWI_request_size + 1; I2CTWI_request_adr = I2CTWI_request_adr | TWI_READ; I2CTWI_buf[0] = I2CTWI_request_adr | TWI_READ; TWI_statusReg.all = 0; TWCR = (1<<TWEN)|(1<<TWIE)|(1<<TWINT)|(0<<TWEA)|(1<<TWSTA)|(0<<TWSTO); TWI_operation = I2CTWI_READ_BYTES_FROM_BUFFER; } else if (TWI_operation == I2CTWI_READ_BYTES_FROM_BUFFER) { TWI_operation = I2CTWI_NO_OPERATION; if(I2CTWI_requestID!=-1) I2CTWI_requestedDataReadyHandler(I2CTWI_requestID); } } } else { uint8_t errState = I2CTWI_getState(); if(errState != 0) { TWI_operation = I2CTWI_NO_OPERATION; TWI_statusReg.lastTransOK = 1; I2CTWI_request_adr = 0; I2CTWI_requestID = 0; I2CTWI_request_size = 0; I2CTWI_transmissionErrorHandler(errState); } } } }
Und das unsere Read Funktion:Code:void I2CTWI_transmitByte_RepeatedStart(uint8_t targetAdr, uint8_t data) { while(I2CTWI_isBusy() || TWI_operation != I2CTWI_NO_OPERATION) task_I2CTWI(); I2CTWI_delay(); TWI_msgSize = 2; I2CTWI_buf[0] = targetAdr; I2CTWI_buf[1] = data; TWI_statusReg.all = 0; no_rep_start = 0; TWCR = (1<<TWEN)|(1<<TWIE)|(1<<TWINT)|(0<<TWEA)|(1<<TWSTA)|(0<<TWSTO); }
Die I2C ISR sieht so aus:Code:uint8_t I2CTWI_readByte(uint8_t targetAdr) { while(I2CTWI_isBusy() || TWI_operation != I2CTWI_NO_OPERATION) task_I2CTWI(); I2CTWI_delay(); if(no_rep_start == 1) { TWI_operation = I2CTWI_REQUEST_BYTES; } else { TWI_operation = I2CTWI_REQUEST_BYTES_REP_START; } I2CTWI_request_adr = targetAdr; I2CTWI_requestID = -1; I2CTWI_request_size = 1; while(TWI_operation != I2CTWI_NO_OPERATION) task_I2CTWI(); if (TWI_statusReg.lastTransOK) return I2CTWI_recbuf[1]; else return 0; }
Und so unsere Funktion zum Abfragen des Sensors:Code:uint8_t no_rep_start; //Wird ein Repeated start vom Slave benötigt? ISR (TWI_vect) { static uint8_t TWI_bufPos = 0; switch (TWSR) { case TWI_START: // START has been transmitted case TWI_REP_START: // Repeated START has been transmitted TWI_bufPos = 0; // Set buffer pointer to the TWI Address location case TWI_MTX_ADR_ACK: // SLA+W has been transmitted and ACK received case TWI_MTX_DATA_ACK: // Data byte has been transmitted and ACK received if (TWI_bufPos < TWI_msgSize) { TWDR = I2CTWI_buf[TWI_bufPos++]; TWCR = (1<<TWEN)| // TWI Interface enabled (1<<TWIE)|(1<<TWINT)| // Enable TWI Interupt and clear the flag to send byte (0<<TWEA)|(0<<TWSTA)|(0<<TWSTO)| // (0<<TWWC); // } else { // Send STOP after last byte TWI_statusReg.lastTransOK = 1; // Set status bits to completed successfully. if(no_rep_start == 1){ TWCR = (1<<TWEN)| // TWI Interface enabled (0<<TWIE)|(1<<TWINT)| // Disable TWI Interrupt and clear the flag (0<<TWEA)|(0<<TWSTA)|(1<<TWSTO)| // Initiate a STOP condition. (0<<TWWC); // } else{ TWCR = (1<<TWEN)| // TWI Interface enabled (0<<TWIE)|(1<<TWINT)| // Disable TWI Interrupt and clear the flag (0<<TWEA)|(1<<TWSTA)|(0<<TWSTO)| // Initiate a REPEATED START condition. (0<<TWWC); // } } break; case TWI_MRX_DATA_ACK: // Data byte has been received and ACK transmitted I2CTWI_recbuf[TWI_bufPos++] = TWDR; case TWI_MRX_ADR_ACK: // SLA+R has been transmitted and ACK received if (TWI_bufPos < (TWI_msgSize-1) ) { // Detect the last byte to NACK it. TWCR = (1<<TWEN)| // TWI Interface enabled (1<<TWIE)|(1<<TWINT)| // Enable TWI Interupt and clear the flag to read next byte (1<<TWEA)|(0<<TWSTA)|(0<<TWSTO)| // Send ACK after reception (0<<TWWC); // } else { // Send NACK after next reception TWCR = (1<<TWEN)| // TWI Interface enabled (1<<TWIE)|(1<<TWINT)| // Enable TWI Interupt and clear the flag to read next byte (0<<TWEA)|(0<<TWSTA)|(0<<TWSTO)| // Send NACK after reception (0<<TWWC); // } break; case TWI_MRX_DATA_NACK: // Data byte has been received and NACK transmitted I2CTWI_recbuf[TWI_bufPos] = TWDR; TWI_statusReg.lastTransOK = 1; // Set status bits to completed successfully. TWCR = (1<<TWEN)| // TWI Interface enabled (0<<TWIE)|(1<<TWINT)| // Disable TWI Interrupt and clear the flag (0<<TWEA)|(0<<TWSTA)|(1<<TWSTO)| // Initiate a STOP condition. (0<<TWWC); // break; case TWI_ARB_LOST: // Arbitration lost TWI_TWSR_state = TWSR; // Store TWSR TWCR = (1<<TWEN)| // TWI Interface enabled (1<<TWIE)|(1<<TWINT)| // Enable TWI Interupt and clear the flag (0<<TWEA)|(1<<TWSTA)|(0<<TWSTO)| // Initiate a (RE)START condition. (0<<TWWC); // break; default: TWI_TWSR_state = TWSR; // Store TWSR TWCR = (1<<TWEN)| // Enable TWI-interface and release TWI pins (0<<TWIE)|(1<<TWINT)| // Disable Interupt (0<<TWEA)|(0<<TWSTA)|(1<<TWSTO)| // No Signal requests (0<<TWWC); break; } }
So sieht das auf dem Oszilloskop aber immer noch aus, wie bei dem Bild in diesem Post oben.Code:void getIR(void) { I2CTWI_transmitByte_RepeatedStart(0x55<<1,0x07); uint8_t irmsb = I2CTWI_readByte(0x55<<1); }
Was muss noch geändert werden?

 Zitieren
Zitieren
Lesezeichen