




 Zitieren
ZitierenHallo!
Es sollte irgendwie bei schwarzer Linie funktionieren, wenn als Lichtsensoren LDR's verwendet werden. Man kann jeden Schalter an jede Platine mit Drähten anlöten.

 Werbung
Werbung

Hallo Community,
vor kurzem habe ich den Entschluss gefasst, dass ich einen kleinen Roboter bauen möchte...
Er soll wenn ich ihn fertig habe, einer schwarzen Linie auf weißem oder hellem Untergrund folgen können.
Über die Suchfunktion dieses Forums bin ich auf den Roboter von RB15 aufmerksam geworden, der ja
fast genau das macht was mein Roboter auch mal können soll... https://www.roboternetz.de/community...erster-Roboter
Da sein Roboter aber eine weiße Linie verfolgt und mein Roboter eine schwarze verfolgen soll,
habe ich mal hingesetzt und eine mögliche Schaltung für meinen Roboter entworfen:
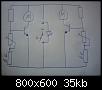
Ich weiß, der Vorwiderstand für die LED fehlt aber den kann ich später ja immer noch einzeichnen...
Jetzt wollte ich nur mal eure Meinung zu meinem Schaltplan hören.
Kann er so überhaupt funktionieren? Wenn nicht, was muss ich anders machen?
Außerdem hab ich noch eine Frage: Gibt es Schalter, die man gut auf eine Platine löten kann?
LG
Chris5454

Hallo!
Es sollte irgendwie bei schwarzer Linie funktionieren, wenn als Lichtsensoren LDR's verwendet werden. Man kann jeden Schalter an jede Platine mit Drähten anlöten.
MfG (Mit feinem Grübeln) Wir unterstützen dich bei deinen Projekten, aber wir entwickeln sie nicht für dich. (radbruch) "Irgendwas" geht "irgendwie" immer...(Rabenauge) Machs - und berichte.(oberallgeier) Man weißt wie, aber nie warum. Gut zu wissen, was man nicht weiß. Zuerst messen, danach fragen. Was heute geht, wurde gestern gebastelt. http://www.youtube.com/watch?v=qOAnVO3y2u8 Danke!
Ja als Lichtsensoren möchte ich LDRs verwenden... Was meinst du mit 'irgendwie'?
"Irgendwie" meine ich, weil keine Bauteilwerte bekannt sind. Ich würde dir empfehlen zuerst ein Motor mit LDR und LED-Beleuchtung ausprobieren. Ich würde den Schalter ankleben und verdrahten.
Übrigens, deine Schaltung könnte man noch vereinfachen, wenn man die serielle mit LDR's Widerstände weg lässt (kurzschliesst) und den Poti zwischen + und Basis anschliesst (das vergrössert die Lichtempfindlichkeit). Furs Experimente muss seriell mit Poti ein strombegrenzender Widerstand (um 1 k) angeschlossen werden, um die Transistoren beim kurzgeschlossenem Poti vom Tod zu bewahren (nicht skizziert). Bei höherer Batteriespannung sind angeblich paralelle zu Motoren für Transistoren "rettende" Freilaufdioden (D1 und D2) und Kühlkörper nötig.Code:S _/ +-o/ o-+---+---+--+-+-+--+---+---+ + | | | |D1| | |D2| | | B - | .-. /+\ - | - /+\ .-. | --- +->| |( M1)^ | ^( M2)| |<-+ - | P1 | | \-/ | | | \-/ | | P2 === '-' | | | | | -' | +--+ | +--+ | | | | | | GND | |/ | \| | +-| T1 | T2 |-+ | |> .-. <| | | | | |Rv | | | === | | === | | GND '-' GND | .-. | .-. LDR1 | | <- <- V -> -> | | LDR2 | | - LED | | '-' | '-' | | | === === === GND GND GND (created by AACircuit v1.28.6 beta 04/19/05 www.tech-chat.de)
Geändert von PICture (05.02.2012 um 16:49 Uhr)
MfG (Mit feinem Grübeln) Wir unterstützen dich bei deinen Projekten, aber wir entwickeln sie nicht für dich. (radbruch) "Irgendwas" geht "irgendwie" immer...(Rabenauge) Machs - und berichte.(oberallgeier) Man weißt wie, aber nie warum. Gut zu wissen, was man nicht weiß. Zuerst messen, danach fragen. Was heute geht, wurde gestern gebastelt. http://www.youtube.com/watch?v=qOAnVO3y2u8 Danke!
Ja du hast recht das mit dem Schalter werde ich wahrscheinlich so lösen, wie du es gesagt hast.
Inzwischen habe ich dein Robbie skizziert, also bitte meine letzte Antwort noch mal anschauen. Nach den Experimenten kann man anstelle von Potis gemessene Festwiderstände einlöten. Die Batterie/Akkuspannung hängt natürlich nur von Motoren und Getriebe ab, da sie müssen wie gewünscht drehen. Mein Artan ( https://www.roboternetz.de/phpBB2/viewtopic.php?t=49233 ) mit 256:1 Getriebe ist mit 1,2 V Akku langsam gefahren, wie von mir gewünscht. Eventuell siehe dazu: https://www.roboternetz.de/community...be-oder-direkt .
Geändert von PICture (05.02.2012 um 16:12 Uhr)
MfG (Mit feinem Grübeln) Wir unterstützen dich bei deinen Projekten, aber wir entwickeln sie nicht für dich. (radbruch) "Irgendwas" geht "irgendwie" immer...(Rabenauge) Machs - und berichte.(oberallgeier) Man weißt wie, aber nie warum. Gut zu wissen, was man nicht weiß. Zuerst messen, danach fragen. Was heute geht, wurde gestern gebastelt. http://www.youtube.com/watch?v=qOAnVO3y2u8 Danke!
Erstmal danke für deine vielen Ideen und deine Mühe um meine Schaltung zu verbessern.
Trimmpotis zur Justierung bei wechselndem Untergrund sind immer gut, dann aber mit seriellem Widerstand gegen Kurzschluss. Die Geschwindigkeit könnte man mit Vorwiderstand bzw. niedriger Versorgungsspannung natürlich verringern, wenn ein Motor noch genug Kraft hätte.
MfG (Mit feinem Grübeln) Wir unterstützen dich bei deinen Projekten, aber wir entwickeln sie nicht für dich. (radbruch) "Irgendwas" geht "irgendwie" immer...(Rabenauge) Machs - und berichte.(oberallgeier) Man weißt wie, aber nie warum. Gut zu wissen, was man nicht weiß. Zuerst messen, danach fragen. Was heute geht, wurde gestern gebastelt. http://www.youtube.com/watch?v=qOAnVO3y2u8 Danke!
Ich denke die Kraft der Motoren sollte ausreichen
Ohne Getriebe habe ich bisher leider keine Erfahrung um dir etwas zu empfehlen.
MfG (Mit feinem Grübeln) Wir unterstützen dich bei deinen Projekten, aber wir entwickeln sie nicht für dich. (radbruch) "Irgendwas" geht "irgendwie" immer...(Rabenauge) Machs - und berichte.(oberallgeier) Man weißt wie, aber nie warum. Gut zu wissen, was man nicht weiß. Zuerst messen, danach fragen. Was heute geht, wurde gestern gebastelt. http://www.youtube.com/watch?v=qOAnVO3y2u8 Danke!
 Berechtigungen
Berechtigungen


Lesezeichen