
 Werbung
Werbung

Gruß Bernd

Mhmm, Cool!
Freut mich, dass Moritz das Teil hinbekommen hat. Er hatte schwer zu kämpfen.
Der versprochene Film würde mich mal interessieren...
Hallo Zusammen!
Es gibt noch ein Quadro-Projekt: Der Nano-Quadrocopter
Matthias hat sich, ähnlich wie Willa seinerzeit, das ehrgeizige Ziel gesetzt, einen Mini-Quadro aus dem Vollen zu schnitzen.
Hardware ist soweit vorhanden, an der Software feilt er gerade...
Langsam sollten wir uns mal Klassen ausdenken, nach denen kleine Copter einzuteilen sind
Inzwischen heißen alle Nano-Irgendwas...
Wer baut den ersten PicoCopter?
Was kommt dann? FemtoCopter? AttoCopter?...
Geändert von deHarry (19.12.2012 um 17:02 Uhr)
Hallo Zusammen!
Die Platinen für den xNQ sind eingetroffen! Hallejuja! Gut, ich hatte mich darauf eingestellt, etwas länger darauf zu warten, aber zum Schluss zieht es sich...
Erste Eindrücke hier mal auf die Schnelle zusammen gehackt.
Und zwei Sofort-anschau-Bilder:

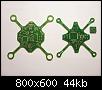
(rechts der Vergleich zum sNQ V2 BL)
Geändert von deHarry (19.12.2012 um 17:05 Uhr)
Hallo Harald,
die Platine schaut gut aus.
Mir ist noch nicht ganz klar, was für Motore und Propeller zum Einsatz kommen.
Grüße
schöne Weinachten
Sven (2)
Hi Sven(2),
danke!
Geplant ist... ach was, alles schon geschrieben, siehe hier: #52
Was dort fehlt ist die Info zu den Propellern.
Ich werde wie beim sNQ auch, die praktischen Silverlit-Propeller einsetzen, die scheinen zu der Coptergröße ganz gut zu passen.
Ein paar zusätzliche Hinweise zum xNQ sind auf meiner HP zu finden.
Hallo Zusammen!
Der xNQ lebt
Ein paar Kleinigkeiten im Code sind noch zu bereinigen, so stimmt die Warngrenze der Akkuspannung noch nicht, die Motoren werden noch nicht korrekt angesteuert (die Berechnung der Fluglage und die Knüppelvorgaben arbeiten nicht in die gleichen Richtungen) und der Nils´sche Algorithmus zur Bestimmung der Horizontallage im Flug lässt den µC abschmieren.
Das ist die Liste der mir momentan bekannten Bugs, vielleicht kommt noch was dazu, immerhin habe ich Willas Code adaptiert, und der ist wirklich absolut rudimentär. Halt so, dass Willa und sonst kein anderer damit fliegen kannUnd es war ein Y6...
Zusätzlich habe ich Willas GUI wieder angeflanscht um die Sensoren zu visualisieren, in diesem Zuge werden auch die Regelungsparameter zwar wieder im EEPROM abgespeichert, im Code aber (noch?) nicht verwendet. Willa hat die Params im Code hinterlegt und liebevoll kommentiert.
Dann kann der xNQ seine ESCs alleine einlernen und programmieren... also nicht wirklich alleine, er reicht nur die Knüppelstellungen der Funke in diesem Modus an die ESCs durch. Die ESCs müssen dafür natürlich (am besten einzeln) nach dem Empfänger und µC mit Spannung versorgbar sein, da für die meisten ESCs beim Einschalten bereits das PPM-Signal auf Vollgas anliegen muss um in den Einlern- und Programmier-Mode zu gelangen. So auch bei diesen hier Verwendeten.
Ihr seht also, Potential für Fehler ist durchaus vorhanden
Ein paar Eindrücke:
Das Sensorboard hängt noch unmotivert in der Gegend rum, ich konnte mich noch nicht entschließen, es irgendwie fest zu pappen. Es wird aber letztlich auf dem µC zu liegen kommen und so nah an der Mitte des xNQ wie möglich platziert werden.
Die schwarzen Böppel an den ESCs sind einzelne gedrehte IC-Sockelkontakte die ich als Stecker für die Stromversorgung der ESCs verwende.
Gewogen habe ich das Teilchen auch schon: 17 Gramm ohne Akku, 26 mit.
Die Abmessungen stehen ja schon auf meiner HP.
 Berechtigungen
Berechtigungen







 Zitieren
Zitieren")

Lesezeichen