




 Zitieren
ZitierenSchneesensor könnte man recht einfach mit einem Helligkeitssensor unter einer Glasplatte bauen. Vielleicht hast Du eine Straßenlaterne am Grundstück, dann kann auch nachts Schneefall dedektiert werden.


hallo erstmal
ich will mir dem nächst nen Schneeschieb-roboter bauen (Sowas ähnliches hier).
also nen Kettenfahrzeug, dass vorne nen Schneeschild dran montiert hat und dann mir im Winter mein Hof lehr räumt.^^
Mechanisch ist das ja alles kein Problem.
aber steuerungstechnisch.
Er soll ja selbstständig den hof lehrräumen und dann wieder zurück zur Basisistation zum Aufladen fahren.
So nun ist aber mein größtes Problem.
Ich weis nicht wie ich ihn beibringen kann zu navigieren.
also er muss ja wissen wo er schon geschoben hat. wo die Grenzen sind
und er muss Hindernissen (Parkendes Auto) ausweichen können.
Das ausweichen ist ja eher net soo das problem, da hab ich auch hier schon einiges gefunden aber woher weis er dass er was er schon geschoben hat?
GPS alleine ist ja zu ungenau und Magnetstreifen oder so würd ich nur ungern verlegen wollen.
könnt ihr mir da vieleicht nen paar tipps geben
und gibs sowas wie nen schneesensor oder so? also irgendwie nen sensor woran er sieht dass es geschneit hat.
regensensoren gibs ja genug aber nen schneesensor hab ich noch net gefunden.
Schneesensor könnte man recht einfach mit einem Helligkeitssensor unter einer Glasplatte bauen. Vielleicht hast Du eine Straßenlaterne am Grundstück, dann kann auch nachts Schneefall dedektiert werden.
hmm okey das is ne gute idee. wenn schnee drauf liegt is es dunkeler. man muss nur das realisieren, dass der neuschnee dann immer wieder runtergewicht wird.
und wenn man das noch mit nem Thermometer koppelt dann hat man auch fehler minimiert.
Aber wie siehts mit der Navigation aus? keiner ne idee?

Du könntest mit Baken arbeiten. Der Roboter muss mindestens 3 Baken erkennen (wie z.B. bei GPS auch). So kannst du die genaue Position bestimmen. Je mehr Baken erkannt werden, desto genauer wird es. Baken kann man optisch oder mit Funk/Tönen machen.
Im Forum gibt es einen Thread, da sind auch Baken verwendet worden. Dan Threadnamen weiß ich aber nicht auswendig.
MfG Hannes

Such Rasenmäherroboter hier im Forum, die beschäftigen sich auch damit.
[X] <-- Nail here for new Monitor
hmm okey
dann such ich mal danach
So hab jetzt mal einiges Durchgelesen. Aber bin da noch net so zufrieden.
Aber hab mir auch schon etwas überlegt. Nur mit der Umsetzung weis ich net wie das funktionieren soll.
Also wegen der Navigation:
da hab ich mir gedacht dass ich das nach dem Prinzip des leica Absolute Trackers mache siehe http://www.youtube.com/watch?v=cxbt262mejI
So nun meine Frage. Wenn ich so nen Teil selber bauen will. Wie realisiere ich das steuerungstechnisch, dass der Laser immer auf diesen Punkt zielt.
also praktisch kann man übern Schritt oder Servomotor ja den Laser in jede richtung drehen lassen
aber woher weis er wo das Target ist, bzw dass er aufs das Target ziehlt? Wie bringe ich es dem bei? Und welche Lasermodule gibs?
weil wenn ich dies realisieren kann, kann ich dann mithilfe des Winkels und der Entfernung und Vektorrechnung die position meines Robos im Hof bestimmen.
Und meine Probleme wären theoretisch gelöst^^
um ein genaueres ergebnis zu erziehlen könnte man auch zwei Laser verwenden.
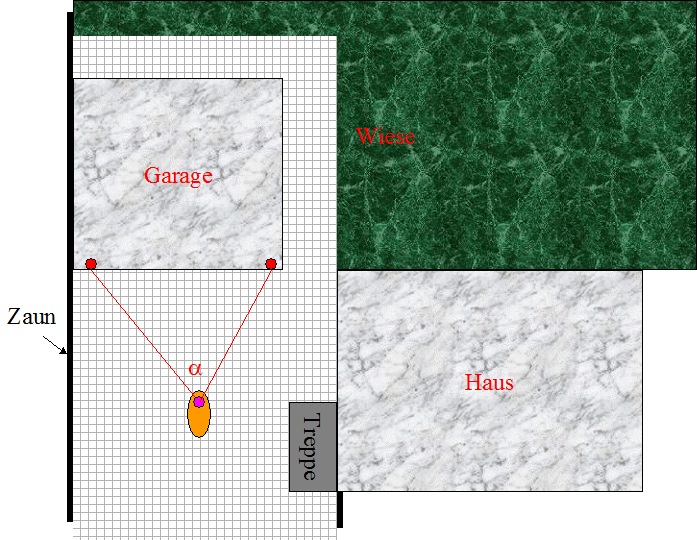
hab unten auch mal nen Bild beigefügt, auf dem zu erkennen ist wie mein Hof in etwa aussieht und wie ich das mit dem Laser gedacht hab.
Der Hof ist ca 10 Meter Lang.
Orangene Etwas = Robo^^
Rote Punkte= Lasersystem
[/img]
Hi,
Ich schätze optische Systeme als nicht so praktisch ein, der Aufwand für die Nachführung des Lasers ist schon enorm. Nachdem das bei dir im Winter funktionieren soll sehe ich bei dichten Schneefall auch Probleme mit der Sichtbarkeit des Lasers kommen.
Such mal nach der "Studienarbeit von Stephan Höhrmann" zur Positionsbestimmung durch Ultraschall, das steht bei mir auf der Liste der sinnvollen Erweiterungen ganz oben.
LG!
alles über meinen Rasenmäherroboter (wer Tippfehler findet darf sie gedanklich ausbessern, nur für besonders kreative Fehler behalte ich mir ein Copyright vor.)
hmm ja stimmt, da haste auch wieder recht.
verdammt. wieso is das so schwirig ^^
hi
nur mal so ne fragen hast du den Type schon mal angeschrieben der des video mit dem Schneeschieb-roboter auf YOUTUBE hochgeladen hat, wie er des gelöst hat oder denkt ihr das der nur ferngesteuert ist??
 Berechtigungen
Berechtigungen

Lesezeichen