






Hallo
Wir haben einen Roboter mit 2 Rädern, die so angebaut sind, dass der Roboter mit ihnen seitlich fahren kann. Links und rechts sind 2 Ultraschallsensoren. Der Roboter soll in einem Raum von den Maßen 120x60cm immer in der Mitte der 120 cm sein. Auf einer der beiden Seiten kann jedoch ein Hindernis sein, wir müssten also im Programm irgendwie herasufinden welcher Ultraschallsensor blockiert ist und welcher korrekte Werte ausgibt. Das soll zu allem Überfluss auch noch die ganze Zeit und möglichst schnell passieren.
Hat jemand eine Idee wie man das machen könnte?
P.S: Ich will keine fertigen Programmcodes sondern nur Ansätze wie man es machen könnte.
Gruß Checker

 Zitieren
Zitieren
 Hoffentlich liegt das Ziel auch am Weg
Hoffentlich liegt das Ziel auch am Weg 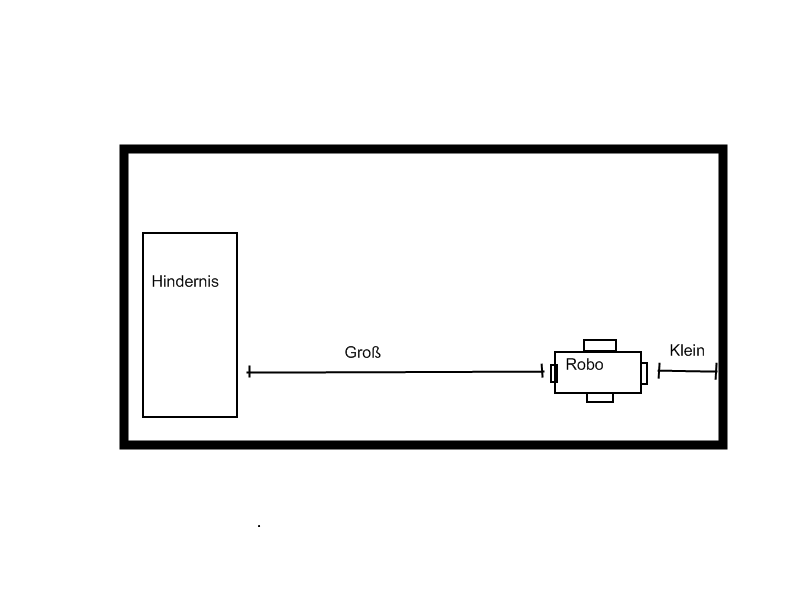


Lesezeichen