







 Zitieren
Zitieren
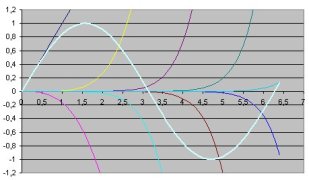
Es reicht 4 für den elementaren Wertebereich.nur wie hoch sollte n sein!??! reicht 15???
Der übrige Bereich ergibt sich durch die periodische Wiederkehr der Funktionswerte.
(Wenn auch die Spiegelung parallel zur y-Achse eingsetzt wird.)
Wir haben auch etwas zur Taylor Reihenentwicklung hier im Roboternetz.
Manfred
https://www.roboternetz.de/phpBB2/vi...?p=28630#28630


Lesezeichen