








Hallo,
Neues Chassis findet ihr ab hier. *KLICK*

Thema Regelung findet ihr hier. *KLICK*
hatte schon in anderen Threads erwähnt das ich einen roboter baue nun möchte ich diesen mal vorstellen.
sein name ist, dank an william: W.E.I.R.D.O.
was heisen soll: White Expedition Intelligent Roboter Drone One
Zuerst mal ein bild:
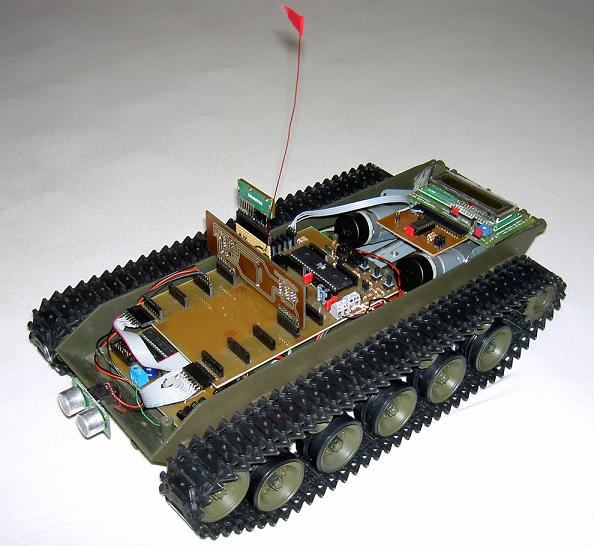
Also das Chassis ist von einem HengLong panzer.
Das getriebe ist derzeit im umbau da ich die EMG30 motoren gekauft habe. mir gefiehl das alte nicht. war zu laut, aus kunststoff und auch zu groß..
als akku verwende ich nun den lipo aus willas tricopterer hat eine nennspannung von 11,1Volt und 3200mAh und ist von kokam.
Das mainboard habe ich schon in einem anderen thread vorgestellt:
https://www.roboternetz.de/phpBB2/ze...911&highlight=
zusätzlich habe ich nun noch ein motorkontroller erstellt. mit zwei parallelgeschalteten L298 so nach dem motto viel hilft viel :-D naja hatte auch beide noch rumliegen. diese werden von einem Atmega8 @16Mhz angesteuert der seine befehle via I2C vom hauptkontroller bekommt.
zusätzlich ist noch ein 433Mhz easy-radio funkmodul, eine Real-Time-Clock + I2C-eeprom, ein I2C 16x2 LCD und vorne ist noch ein SRF04 US-Sensor verbaut.
wenn die motoren montiert sind wird die chassiswanne mit einer alu-plate verschlossen um darauf dann die elektronik und Sensoren zu befestigen. lediglich der motortreiber bleib in der wanne. evtl auch noch wenn ich es umsetzte eine akkuüberwachung aber das ist erstmal nebensächlich.
Meine ziele für diese projekt sind folgene:
- relativ gute navigation bzw wegerfassung (sogut es ketten zulassen) dazu gehören dann anfahrrampen usw.
- implementierung einer funkkamera und fernsteuerung des roboters via pc
- installation von weiteren sensoren. Hinten und an den seiten jeweils zwei Sharp IR, vorne sollen zwei US Sensoren platz finden und ein 3 achs beschleunigungssensor um die lage feststellen zu können. ggf noch mit gyros
- navigation per GPS
- entwicklung einer ladestation die der roboter selber anfahren kann... ideen sind schon vorhanden
- entwicklung und montage eines greifarms (manipulator)
- mit hilfe der kamera und bildverarbeitung objekterkennung + greifen dieser objekt (vollautonom)
optional:
- ich überleg vorne sowas wie ein auswechselbaren vorsatz zu entwicklen. sprich einen linienfolger oder einen bürstenvorsatz. das ganze sollte dann immer die selbe I2C slave addresse haben und am anfang frag der hauptkontroller ab um welchen vorsatz es sich handelt.
was meint ihr dazu?
- ein neueres tragfähigeres chassis dann aber marke eigenbau
für all diese aufgabe lasse ich mir länger zeit habe mir also keine grenze gesetzt. als erstes soll der roboter zu meiner zufriedenheit navigieren können.
hat sich bereicht erledigt:
nun stellt sich noch die frage nach einen name für den roboter. wollte ihn ers W.E.R.O. (White Expeditions Roboter One) nennen da ich ursprünglich ein chassis selber bauen wollte das sollte dann weiß werden. dies ist er ja nun nicht mehr.. gut ich könnte in umlackieren aber das zerlegen des chassis könnte sich als sehr schwierig erweisen.
also wer ideen oder anregungen hat oder einfach nur einen komentare abgeben möchte! immer her damit.
Freundlicher Gruß,
Bammel

 Zitieren
Zitieren

Lesezeichen