-
 Werbung
Werbung
-
Erfahrener Benutzer
Roboter Genie
Ich meinte das so:
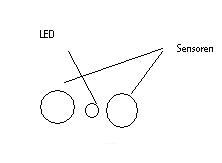
Solange die linie zwischen den beiden Sensoren ist, fährt der Bot geradeaus, doch sobald sie aus dem Zwischenraum rausrutscht und in den Erfassungsbereich des Sensors gerät, gleicht der bot dies aus, sodass sich die Linie wieder zwischen den Sensoren befindet. Übrigens: Die Sensoren müssen natürlich weiter auseinander und die LED kann(wenn die Sensoren eigene Lichtquellen haben) weg.
 Berechtigungen
Berechtigungen
- Neue Themen erstellen: Nein
- Themen beantworten: Nein
- Anhänge hochladen: Nein
- Beiträge bearbeiten: Nein
-
Foren-Regeln
Werbung 








 Zitieren
Zitieren
Lesezeichen