-

-
Erfahrener Benutzer
Begeisterter Techniker

CNC mit Gleichstrommotoren
Hi,
so hier ist mein Projekt das ich komplett aufbaue mit Stahlführungen und mit Gleichstrommotoren. Für Gleichstrommotoren hab ich mich entschieden da ich ein gutes dynamisches Verhalten erreichen will, also hohe mögliche Verfahrgeschwindigkeit (ca Fmax1800 == 1800mm/min) mit gleichzeitig guten Eigenschaften was Präzision angeht. Vor allem will ich das gleiche Konzept umsetzen wie es in regulären Fräsmaschinen eingesetzt wird.
Die Regelung der Antriebe baue ich auf mit einem ATmega64 der mit einer modifizierten PID Regelung die Gleichstrommotoren via PWM steuert. Die Regelung ist/wird so implementiert das sie als Basis die PID Logik benutzt (also wirklich PID und nicht etwa PD) mit einem modifizierten Integralanteil, der erkennt das "er" sich dem Zielpunkt nähert und dann aktiv abbremst statt einfach nur die Steuerspannung zu reduzieren wie dass eine normale PID Regelung macht. Hierzu habe ich mir ein Modell überlegt das mittels Regelungs-Parametrisierung die Massenträgheit der Abtriebseinheit (incl Rotor des Motors) wiederspiegelt und für jede Achse entsprechend der mechanischen Eigenschaften Parametrisierbar ist.
Das Ganze ist in einer Simulation die ich hierfür schrieb schon ganz ordentlich gelaufen, die Graphen U-t, v-t, s-t und a-t sind schon einigermassen stetig und haben kaum "Hacker" im Verlauf, so dass der Antrieb nicht übermässig belastet werden dürfte.
Hier im Forum habe ich nur Projekte gefunden mit Schrittmotoren die mit käuflichen Controllerkarten gesteutert werden. Aber ich wollte alles selbst aufbauen und eben keine vorgefertigten Schaltungen benutzen.
Die mechanische Seite beruht auf Lineareinheiten die mit einer T-Führung ausgestattet sind und über Kreutz miteinander verschraubt werden. Die Linearführungen sollen so Stabil werden, dass ich auch Stahl damit fräsen kann, zumindest in kleinen Zustelltiefen.
Als Basis benutze ich eine gewöhnliche Säulenbohrmaschine die mir die Z-Achse gleich mitliefert.
Hier ein paar Konstruktionszeichnungen der geplanten Maschine im Solid-View noch ohne Antriebe:

Detail: Kreutzschlitten

Detail: Kreutzschlitten andere Ansicht
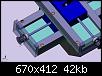
Detail: Gesamtansicht
Wenn ich wieder ein Stück weiter gekommen bin werd ich das hier berichten.
Was denkt Ihr davon?
Gruss,
O.
Geändert von Osser (14.01.2022 um 07:47 Uhr)
Stichworte
 Berechtigungen
Berechtigungen
- Neue Themen erstellen: Nein
- Themen beantworten: Nein
- Anhänge hochladen: Nein
- Beiträge bearbeiten: Nein
-
Foren-Regeln








 Zitieren
Zitieren
Lesezeichen