




 Zitieren
ZitierenWar ehrlich gemeint! Drücke fest die Daumen! VG Micha

 Werbung
Werbung


also habe ich das richtig verstanden das du vom pc ein takt und richtungssignal bekommst und das auf den motor quasie sendest!? (doof ausgedrück)
ich stelle bzw. würde mir wünschen das das ganze genauso funktioniert wie bei ner schrittmotorsteuerung nur halt mit nem dc-motor (servo halt)
das umkehrspiel wird dort dann ja auch vom pc umgerechnet.
War ehrlich gemeint! Drücke fest die Daumen! VG Micha

Hi Bammel,
die Steuerung funktioniert ganz anders als bei Schrittmotoren und ich verwende keinen PC sondern einen Micro Prozessor von Atmel. Prinzipiell geht das aber auch beinahe genauso mit einer PC Steuerung.
Beim Schrittmotor hast du eine Leitung für den Takt (n Steps/min) die Richtung (vor/rück) evtl. eine für Halbschritt und meist eine Enable/Disable Leitung (Steuerung ein/aus).
Bei der Gleichstrommotor Lösung kann man mit 2 oder 3 Leitungen Auskommen. Da ich mit meiner Schaltung auf die Bremsfunktion verzichtet habe reichen mir 2 Leitungen.
Leitung 1: Richtung (vor/rück)
Leitung 2: PWM (U/min)
PWM(Puls Weiten Modulation) ist einfach eine Schwingung mit gleicher Periode und einstellbarer Pulsweite. Meine PWM Grundfrequenz ist ca. 28KHz, so dass das Ganze nich hörbar ist.
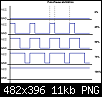
Legende: PWM (https://www.roboternetz.de/wissen/in...itenmodulation)
Das Problem bei PWM ist dass wenn man z.B. PWM im Intervall ]0,255[ einstellen kann nicht etwa 1 die langsamste Geschwindiogkeit ist, 127 mittel schnell und 255 die schnellste. Meine empirischen Werte für den jetzigen Motor sind z.B. folgendermassen.
Das Losbrechmoment(bis er beginnt zu drehen) wird erreich bei folgenden PWM Einstellungen:
vorwärts: ~87
rückwärts: ~112
Hysterese von der Losbrechmoment PWM Einstellung bis wieder zum Stillstand ist bei mir ca. 6-8 Einheiten weniger.
Die Angaben beziehen sich hier auf eine Vorsteuerspannung von ~10V.
Ein Motor läuft halt noch nicht Los bei einer Effektiv Spannung von 0,5V wenn er eine Nennspannung von 8,0V hat sondern erst bei ca 4,5V, dann aber gleich mit 1000U/min.
Der Trick für die Lageregelung die ich baue ist jetzt der, die Steuer PWM Einstellung so geschickt zu wählen dass der Motor exact so weit Dreht wie das vom ISO Programm (G-Code/M-Code) vorgegeben wurde.
Soll der Motor z.B. eine Umdrehung durchführen (entspricht 1mm Verfahrweg) muss die Motor-Regelung dafür sorgen dass:
1) das Losbrechmoment überwunden wird
2) der Motor auf die Solldrehzahl beschleunigt
3) die Solldrehzahl einen bestimmten Weg lang hält
4) wieder rechzeitig abbremst um genau an der richtigen Position stehen zu bleiben
Dummerweise sind die Punkte 1-4 nicht wirklich trivial, da sich die Parameter für jede Achse unterscheiden und in der Praxis sogar von der Werkstückgrösse abhängen. In der Praxis kann eine Stahlplatte leicht mal 500Kg wiegen worauf die Antriebe natürlich dementsprechend reagieren müssen. Für meine Mini-Fräsmaschine ist das aber vermutlich unrelevant.
Erst mal Stahl für die Lineareinheit besorgen beim freundlichen Stahlhändler und dann schaun wir mal weiter.
O.
Geändert von Osser (14.01.2022 um 07:59 Uhr)
Das mit den Gleichstromotoren ist nicht so ungewöhnlich. Die Kombination Motor+ Dehgeber + Regler wird auch als Servomotor angeboten. Das ist durch die Steuerung etwas aufwengider als mit Schrittmotoren, aber man hat eine meist bessere Dynamik. Allerdings hat man praktisch kein (nutzbares) Rastmoment und muß auch im Stillstand immer aktiv nachregeln. Das kann im zusammenspiel mit Umkehrspiel etwas problematisch werden.
Für eine genaue Regelung der Position gibt es extra Motoren mit wenig Rastmoment und mit integriertem Incrementalgeber.
jup alles klar. aber du verwendest also bei deinem vorhaben deine eigene "norm" und jezze nicht die das du universel andere fräsprogramme nutzen kannst. das wäre so mein ding einen dc-motor, sprich servo, mit den signalen zu "befeuern" die auch eine strittmotorsteuerung braucht bzw verwendet.
wenn du sowas bauen würdest wärest du glaub ich der held hier unter den fräsenbauern :-D sofern es dann auch nachbarbau ist
Hallo
Was ist das für eine Maus?"geschlachteten" Maus die ca. 270 Impulse pro Umdrehung erzeugen
Es ist nicht jeder DC Motor als Servomotor geeignet.
Bei den billigen Motoren sind die Kollektoren z.B. nicht fein genug unterteilt, wodurch die Lageregelung zu wünschen übrig läßt.
Mit freundlichen Grüßen
Benno
Wo man nicht mit Vernunft handelt, da ist auch Eifer nichts nütze; und wer hastig läuft, der tritt fehl.
Ein König richtet das Land auf durchs Recht; wer aber viel Steuern erhebt, richtet es zugrunde
mit was machst du die pc software?
Hi @all,
@Besserwessi:
Die Regelung, wie sie jetzt ist, beendet sich selbst nach erreichen der vorgegebenen Position. Später wird jeder der Achsregler via Sheduler endlos beaufschlagt, dazu benutze ich die Multitaskinglogik die ich bereits entwickelt habe (https://www.roboternetz.de/phpBB2/ze...t=multitasking).
Durch die Regelung erhalte ich ein gewisses Haltemoment, da bei Auslenkung vom Istwert aktiv gegengesteuert wird. Da M6 mit einer Steigung von 1mm aber selbsthaltend ist wird ein Haltemoment vom Motor denke ich nicht nötig werden.
@Bammel:
Dem µC wird über die serielle Schnittstelle dann ISO Code überspielt, also z.B.
G00 Z10.
G00 X10. Y20.
G00 Z5.
G01 Z1. F300
G01 Z-0.1 F50
G01 ...
...
jeweils Zeile für Zeile mit einem kleinen Zeilenpuffer im µC. Deshalb habe ich auch den ATmega64 gewählt da er 4K SRAM hat was zum Puffern des ISO-Codes gebraucht wird abzüglich der belegten Variablen etc.
@Yossarian :
Das war ne alte Logitec Maus von 1992. Den Getriebemotor hab ich bei Conrad erworben
Motor 4-15V/12V/DC 11:1 ArtNo:222363 - 62
mit einer 16er Kommutator Teilung und der Stator besteht aus 4 Magneten soweit ich das sehen kann.
@Thomas$:
Die Software zum seriellen übertragen der ISO-Daten muss ich noch schreiben. Werd am Anfang wohl AsuroFlash Script verwenden (https://www.roboternetz.de/phpBB2/vi...er=asc&start=0).
Gruss,
O.
Hi @all,
so den Flachstahl für die Lineareinheiten hab ich beim freundlichen Stahlhändler bestellt und die Specs. dort erklärt. Es müssen ja ein paar Fräsarbeiten erledigt werde die ich momentan noch nicht selbst ausführen kann. Nächste Woche ist das fertig, hat Er zumindest gesagt, dann kann ich die erste Einheit zusammenbauen. \/
..wie lange eine Woche doch sein kann ---schmacht---.
O.

Das Ganze muss aber noch auf beiden bzw. allen drei Achsen synchron funktionieren damit die Bahn exakt abgefahren wird.
MfG
Manu


Lesezeichen