Guten Abend Allerseits,
ich habe für meinen TriCopter diese Fernsteuerung hier.
Allerdings bekomme ich diese nicht richtig Programmiert.
Laut Programm von Willa´s Seite muss der eingehende Wert von Channel 1 und 5 500 mal zwischen 50 und 80 sein, damit der TriCopter den weiteren Code abarbeiten kann.
Code:
If Empf(5) > 80 Or Empf(5) < 50 Or Empf(throttlechannel) > 80 Or Empf(throttlechannel) < 50 Then 'sticks not in correct position
If Rc_on_counter > 0 Then
Decr Rc_on_counter
End If
Else 'sticks in correct position
Incr Rc_on_counter
End If
Mit dem Tricopter_ReceiverCheck.bas sehe ich das von meiner Fernsteuerung allerdings nur diese Signale hier reinkommen:
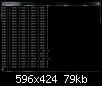
Jetzt frage ich mich, ob ich die Werte im Programm ändern muss, damit das Programm weiter läuft oder muss ich das an der Fernsteuerung ändern?
Mit diesem Programm hier kann ich die Fernsteuerung programmieren:

Vielleicht kennt sich ja jemand mit dieser Fernsteuerung aus 
Danke
Gruß,
Jan-Niklas









 Zitieren
Zitieren



Lesezeichen