




 Zitieren
ZitierenIch werde Dich in mein Nachtgebet einschließen.... *lol*Zitat von Richard


 Werbung
Werbung


Eigentlich nicht. Durch Rückgriff auf mühevoll erarbeites Halb- (in meinem Fall) und Fachwissen (in Arkons Fall) ist so ein Artikel in Nullkommanix geschrieben

Ich werde Dich in mein Nachtgebet einschließen.... *lol*
Meine Webseite
http://www.pc-braunschweig.de
Hi Nils,
Scotch hat alles Wesentliche zusammen gefasst.
Willa hat mal zumindest die Idee, den IMU per I²C auszulesen, nicht komplett augeschlossen und einer der Svens (wenn ich mich recht erinnere) hat theoretisch "bewiesen", dass sich die beiden Kommunikationspfade nicht gegenseitig im Weg sind. Sein Argument war, glaube ich, dass die Motoren ihre Werte bekommen, wenn alles fertig berechnet ist, die Sensoren aber vorher ausgelesen werden müssen, um Werte für die Berechnungen zu bekommen.
Allerdings ist ja nach der Berechnung und vor der Berechung eigentlich die gleiche Zeit... Ich kann nur vermuten, dass genug Reserven im Mega328 stecken, um die Zeitanforderungen erfüllen zu können. Gegenseitig beharken können sich die beiden Kommunikationspfade nicht, da nur eine Datenleitung vorhanden ist, die für beide Richtungen (lesen der Messwerte und senden der Stellwerte für die Motoren) verwendet wird. Nacheinander.
Meine beiden Ansätze des IMU-Würfelersatzes per SD-746 und MPU-6050 sind jedenfalls von dieser Voraussetzung ausgegangen. Bisher hat aber meines Wissens noch niemand den Beweis angetreten.
SEMESTERFERIEN!!!!!!
Endlich.....
...hab ich wieder Zeit meine DLXm flugfertig zu machen. Die liegt schon seit Monaten mit gebrochenem Flügel in Ihrer Kiste.
Aus diesem Anlass frage ich mal vorsichtig nach ob noch jemand (Willa) ein paar 5x3 GWS 3-Blatt oder andere Artikel von www.gwsprops.com braucht. Der Shop kommt aus den USA ist aber einer der wenigen, der die kleinen Dreiblätter verkauft. Würde ne Sammelbestellung machen um die Versandkosten zu drücken.
BTW: Ich habe grade eine E-Mail an CNC-Modellsport geschickt und gefragt, ob sie nicht vielleicht doch Lust hätten meine letzte Bestellung welche ich vor 10 Monaten aufgegeben und bezahlt habe zu verschicken
Alles ist möglich. Unmögliches dauert nur etwas länger!
Hallo Harry,
danke für deine Ausführliche Erklärung.
Ich habe aber auch noch eine Frag zu i2C.
Auf dem Triguid sind ja die Wiederstädte für den I2C Port drauf.
Ich habe hier ein BMP085 Drucksensor der auch per I2C angesprochen wird.
Der Sensor ist auf ein Breakout Board von Watterott
http://www.watterott.com/de/Breakout...en-Drucksensor
Auf dem Breakout Board sind ebenfalls Widerstände drauf. Muss ich die dann entfernen?
Gruß Ingo
Meine Webseite
http://www.pc-braunschweig.de

Nein muss du nicht. Aber wenn du einen 5V Arduino hast must du einen Converter für das 3,3V Signal des BMP085 haben.
MFG
Matthias
Hallo Matthias,
stimmt die 3.3 V da war etwas. Aber ich habe irgend wo noch einen Spannungsregler rum liegen...
Gruß Ingo
Meine Webseite
http://www.pc-braunschweig.de
Aber nicht vergessen das auch das I2C Signal auf 5V umgesetzt werden muss sonnst lebt der Drucksensor nicht lange
War das nicht umgekehrt?
Das I²C-Signal muss für die Lebenserwartung des Sensors auf 3,3 V gedrück werden.
Und der Mega328 braucht das I²C-Signal mit mindestens 3,2 V (rechnet man die Toleranzwerte nach Datenblatt).
Meine Theorie geht zwar in die Richtung, dass man zumindest einen Versuch wagen kann, ob die gegebene Kombination von Sensor und AtMega eventuell zusammen spielt, wenn die beiden I²C-Leitungen mit PullUps nach 3,3 V versehen werden, sicherer (im Sinne von Erfolg versprechender) ist aber, zwei FETs und zwei zusätzliche Widerstände zu spendieren und einen Pegelwandler nach der Appnote von Philipps (jetzt NXP) dazwischen zu schalten.
Den Tipp mit der Appnote bzw. den beiden FETs habe ich von Günter und Richard (siehe hier und ff: https://www.roboternetz.de/community...l=1#post493717).
Jo, Fehler vom Amt, das Signal muss auf 3,3 Volt runter. Aber man kann den Sensor nicht einfach so an ein Atmega anschließen. Auch mit Pull-Ups nicht. Denn der Atmega stellt den I2C Takt bereit und dann stehen 5V auf der Leitung. Oder meintest du Spannungsteiler? Das könnte funktionieren.
Mit den Sensor hab ich schon ausgiebig rumgespielt. Mein Converter sieht so aus,
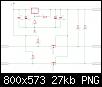
Ist im Grunde das Gleiche wie die Schaltung aus den Mikrocontroller.Net Forum und funktioniert super.
Mfg
Matthias
PS: Ich weiß, der LM317 ist nicht exakt auf 3,3V eingestellt. Sind ungefähr 3,05V. Funktioniert aber trotzdem.
 Berechtigungen
Berechtigungen

Lesezeichen