




 Zitieren
ZitierenDas war genau die Aufgabe für die dieser Roboter hier vor langer Zeit gebaut wurde.
https://www.roboternetz.de/phpBB2/vi...=128948#128948
http://davidbuckley.net/RS/mmouse/micromouse80.htm

 Werbung
Werbung


DAS nenne ich mal Geschwindigkeit :
http://www.robots-dreams.com/2008/11...ideo.html#more

Das war genau die Aufgabe für die dieser Roboter hier vor langer Zeit gebaut wurde.
https://www.roboternetz.de/phpBB2/vi...=128948#128948
http://davidbuckley.net/RS/mmouse/micromouse80.htm

hi Andree,
Wahnsinn!
Und "nur" den 6. Platz belegt?
Gibt es schon Fortschritte mit dem Adapter?
liebe Grüße,
Klingon77
Der kürzeste Weg zwischen zwei Menschen ist ein Lächeln - http://www.ad-kunst.de
Joo, habe gerade Heute Platinen für die Steuerung in Auftrag gegeben. Die Software macht mir noch Schädelaua...aber es wird !Gibt es schon Fortschritte mit dem Adapter?
Schade dass es in D kaum eine Lobby dafür gibt.
Letzendlich ist es auch mehr Informatik als Robotik

Wenn ich mir das so ansehe 7,1 Sekunden, was wäre den technisch noch machbar, oder sind bereits die grenzen der Physik erreicht? Die Idee sich zusätzlichen Anpressdruck durch Vakuum zu erzeugen ist schon mal nicht schlecht, aber was geht noch?
Ich kenne die Regeln nicht so genau,
darf man die Wand berühren?
Ich denke hier ist mehr die Kurvengeschwindigkeit als die Endgeschwindigkeit ausschlaggebend. Das schnellste was ich in Sachen Kurvengeschwindigkeit je gesehen habe, sind RC Speedboote.
Die tauchen in den Kurven manchmal richtig ab um schnell abzubremsen um dann wieder mit vollgas loszufahen. Hört sich jetzt komsich an, ich such mal ein Video...
Majus
EDIT: Soetwas meinte ich:
http://www.youtube.com/watch?v=zPh8XzOP1M4
http://www.youtube.com/watch?v=4Towzq7h94E
Mir ist schon bewusst das da in dem Labyrint kein Wasser ist, vielleicht kann man sich an dem Prinzip aber was abschauen...
Mhm vielleicht sollte man den Vakuumsauger an das Fahrverhalten anpassen. D.h. nur in Kurven voll saugen und sonst eher weniger je nach dem ob man nun beschleunigen will oder einfach nur fahren.
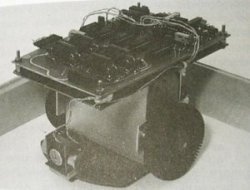
In der frühen Phase waren die controllergesteuerten Labyrinth Roboter möglichst groß, um alle Funktionen gut unterzubringen.
Gewonnen hat sogar einer (Anfang der 80er Jahre) der das Feld-Element gut ausgefüllt hat und sich damit an den Wänden ausgrichtet hat. Er hat sich nicht gedreht sondern nur mit 4 Rädern gelenkt, längs/quer (90°) und vorwärts/rückwärts (180°).
Eine Alternative waren auch noch kleine rein mechanische Mäuse die mit Uhrwerkantrieb sehr schnell konsequent an der Wand entlanggefahren sind und so auch das Ziel erreichen konnten. Sie wurden dann aber schon geschlagen.
wow, ist auch eine klasse disziplin für den robotest.
grüßle
 Berechtigungen
Berechtigungen

Lesezeichen