







 Zitieren
Zitieren
hi,
in der Industrie wird oft die Spitze der Zähne eines Zahnrades abgetastet.
Die Zahnräder sind da aber auch größer.
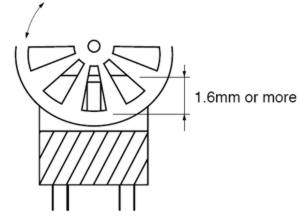
Wäre es ggf. auch möglich gewesen die Zähne des Zahnrades zur Unterbrechung oder zumindest zur Abschwächung des Lichtstrahls zu nutzen?
Modul 0,75 schätze ich mal; Zahnhöhe also ca. 1,5mm?
Als ich noch keinen Rundtisch hatte druckte ich mir im Corel-Draw immer eine passende Scheibe mit den Bohrpunkten aus.
Diese klebte ich dann möglichst genau auf das Werkstück und konnte danach die Bohrungen körnen und Bohren.
Zum Kleben verwendete ich Sprühkleber, welcher ein nachträgliches Abziehen des Papiers erlaubte.
Freue mich schon darauf mehr von Deinem Projket zu lesen.
liebe Grüße,
Klingon77


Lesezeichen