




 Zitieren
ZitierenMich fasziniert diese 3D Mallerei immer wieder!
Aber verstopft der Vakumtisch nicht recht gerne?

 Werbung
Werbung


hi Bammel,
viele benutzen einen leistungsfähigen Staubsauger.
Der bringt zwar nicht viel Unterdruck aber eine hohe Literleistung.
Das ist dann wieder bei Durchfräsungen gut.
Nicht benutzte Flächen des Vakuumtisches kann man einfach mit einem Blatt Papier abdecken.
Beim Staubsauger sollte man darauf achten, daß er 100% ED hat.
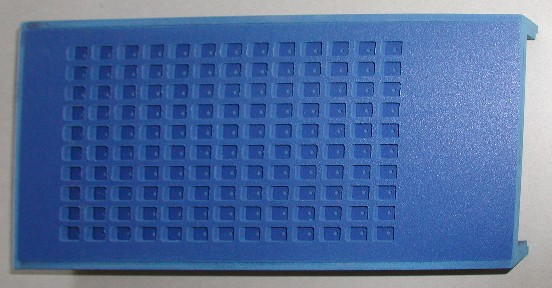
Auf dem Foto unten siehst Du, wie ich mir das vorstelle.
Zum Teil sind die Teile schon gefräst.
Die Stirnseite habe ich ausgeblendet, damit man die gelochten Spanten sieht.
liebe Grüße,
Klingon77
Der kürzeste Weg zwischen zwei Menschen ist ein Lächeln - http://www.ad-kunst.de
Mich fasziniert diese 3D Mallerei immer wieder!
Aber verstopft der Vakumtisch nicht recht gerne?
Gruß Eddie
__________________________________________________ ___________________
Habe keine Angst davor, etwas Neues auszuprobieren, ein Amateur hat die Arche gebaut, Profis die Titanic!

sieht interesant aus. ich hatte mir da auch schon nen paar gedanken drum gemacht.
klingon77 du musst mir mal erklären wie du die zeichnungen machst.
Hallo klingon77
diese Version gefällt mir ,gleich mal gezeichnen werde das mal aus geschäumten ABS Platten fräsen
da ich auch mal wieder eine Platinen Fräse baue mit kleinen Escapmotoren
http://de.youtube.com/watch?v=hV7uK0hPT1s
Gruß Lacky
hi lacky,
willkommen im Forum !
Freut mich, wenn es Dir zusagt.
Stirnseitig möchte ich mit jeweils einem Schlauch (oder auch zwei/Seite) aus dem Tisch rausgehen.
Dann wird der "Flow" nicht durch einen einzelnen dünnen Schlauch gebremst.
Wenn das Konzept funktioniert werde ich ggf. nochmal in Alu bauen.
Als Opferplatte möchte ich die hölzerne Deckplatte nochmal fräsen und einfach auflegen.
Die Opferplatte kann man dann immer mal wieder erneuern.
Sperrholz ist ja nicht eben teuer.
Fräse:
4 Sekunden Video sind beim ersten Mal verblüffend!
Beim dritten Durchlauf drückte ich auf Pause um mir die Maschine anzuschauen.
Ist in X nur eine Linearführung?
Gewindespindel mit Servomotor außen? Was ist ein Escapmotor?
Wo ist Y?
Wenn ich mir die verbauten Komponenten so anschaue, denke ich Du weist was Du machst\
/
Kannst du mal ein paar Fotos einstellen?
Interessiert mit Sicherheit den Rest der "Gemeinde" ebenfalls.
"Auch mal wieder baue..."
Welche hast du schon (wie) gebaut?
@Meddie:
Verstopfen kann es eigentlich nur, wenn in dem Bereich druchgefräst ist.
Dann ist es sogar von Vorteil, weil keine "Falsch-" Luft gezogen werden kann.
Nach dem Fräsen mit Druckluft (denke so 1-3 bar) von außen reinblasen und die Bohrungen sollten wieder frei sein.
Soweit die Theorie!
@Bammel:
Ich zeichne mit SolidEdge V18 Schullizenz.
Durch einen "glücklichen" Zufall bekam ich eine Lizenz in Deutschland.
liebe Grüße,
Klingon77
Der kürzeste Weg zwischen zwei Menschen ist ein Lächeln - http://www.ad-kunst.de
Hallo Klingon77
Der Escap Motore 24 VDC Glockenankermotor 70x35mm
reicht hier für über 150mm/sec mit einen UHU Servoregler mit 35 V
500 Encoder ca 2,5 fach untersetzt auf eine 10 x10 Kugelspindel
Auflösung 2000x2,5/10= 500 Schritte pro mm mit ca 250mm Verfahrweg
der Aufbau der Y und Z steht noch nicht ganz fest
da die Linearführung für X+Y ca 400mm hat
Bilder kann ich dir schicken da ich keine HP habe hochladen ist so recht umständlich
https://www.roboternetz.de/phpBB2/al...hp?pic_id=2103
die erste Platte ist gerade fertig noch schnell die zweite mit den Bohrungen
Gruß Lacky
Klick auf "antwort erstellen" und dort dann unten auf "Attachment Hinzufügen" dann kannst du deine Bilder aufs Forum laden, hat bei mir auch gedauert bis ich das erkannt hab xD
Meine Fräse ist im moment auf Eis gelegt bis ich neue Motoren habe.
Ich hab da auch noch ne Frage zu NC-FRS,
Wenn ich die Geschwindigkeit runtersetze fährt fahren die Achsen zwar ultra langsam zu den anfangs-koordinaten aber beim Fräsen haben sie immer die selbe geschwindigkeit? Wo kann ich die Fräs Geschwindigkeit einstellen?
Ich hab jetzt bei eBay gesehn das man da die AluProfile recht günstig ersteigern kann ich überlege das ganze ding nochmal neu aus Alu zu bauen .
mfg. Schnipp
@klingon77:
ich habe hier solid edge v20 aber irgendwie komm ich nicht so mit zurecht habe auch nicht so die ahnung vom cad (leider) wie erstellst du damit 3d? weist du ob es ne seite mit lernprogrammen gibt? technisch zeichnen mit hand kann ich.
Bilder kannste auch mit irfanview komprimieren und in deiner Gallery hochladen hab ich zum beispiel mit dem gemacht (meine Fräse):
https://www.roboternetz.de/phpBB2/al...hp?pic_id=2093
EDIT: sry, Klingon77, ich werd in Zukunft meine Bilder kleiner machen
Gruß, AlKi
Jeder Mensch lebt wie ein Uhrwerk, wie ein Computer programmiert...
==> UMPROGRAMMIEREN!
Kubuntu
Danke
https://www.roboternetz.de/phpBB2/al...hp?pic_id=2103
https://www.roboternetz.de/phpBB2/al...hp?pic_id=2104
so sieht es jetzt aus
https://www.roboternetz.de/phpBB2/al...hp?pic_id=2107
die obere Platte ist zum einlegen
Staubsaugeranschluß und Befestigung fehlen noch
Gruß Lacky
 Berechtigungen
Berechtigungen


Lesezeichen