






 )
)
 Zitieren
Zitieren
hi,
ich wollte unten zwei Rollen haben, um das Gewicht des Stator-Ringes auf die Lauffläche von zwei Rollen und zwei Lagerungen zu verteilen.Zitat von ähM_Key
Man hält sich, mit beiden Rollen unten auch die Tiefste Stelle frei, um dort den/die Akku (´s) anzubringen. Der Platz ist dann nicht mit einer Rolle, Lagerung und Antrieb belegt. Niedriger Schwerpunkt.
Da hast Du wahrscheinlich recht.
Der Gedanke bei zwei angetriebenen Rädern ist der, daß sich die Abnutzung der Antriebsräder, welche durch die Runde Lauffläche nur eine "Punktauflage" haben verringern sollte.
Das geht aber bestimmt auch mit einem angetriebenen Rad.
Die Abnutzung kann man verringern, indem man in der Motorsteuerung durch PWM eine "Rampe" in der Beschleunigung und beim Abbremsen "fährt".
Da hast Du sicherlich Recht!
Das Gewicht könnte man noch durch große Bohrungen im Bereich oberhalb der Antriebsplattform (muß ich noch zeichnen) reduzieren.
Das ist eine Gute Idee!
Dies würde ich aber erst ganz am Ende der Fertigung machen. Zuerst müssen alle Teile angebaut sein, sonst könnte es passieren, daß ich keinen Platz mehr habe um notwendige Schrauben/Gewinde anzubringen.
Da wir noch kein Rad haben, sind die Maße auch noch nicht fest.
Akku´s und Motoren können auf der Plattform gleichmäßig links und rechts verteilt werden.
Wenn die Verteilung nicht zu 100% symetrisch ist, dürfte dies auch kein Beinbruch sein. Es sollte in der Grundkonfiguration mit Hilfe der Position des verschiebbaren Ausgleichgewichtes kompensierbar sein.
Dies wird dann einfach ein wenig mehr nach einer Richtung ausglenkt.
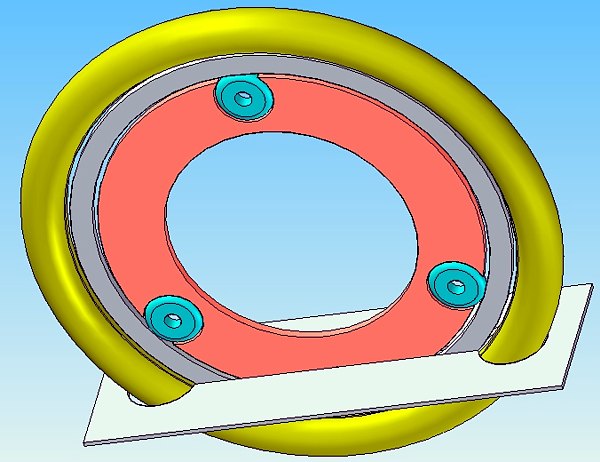
anbei noch eine Skizze mit einer gedachten Grundplatte. Diese wird an den Stator-Ring geschraubt.
Die Platte ist noch ohne Versteifungen oder Befestigungen ausgeführt.
Hat jemand eine Idee, welche Rollen man zur Seitenführung des Stator-Ringes am äußeren Alu-Ring verwenden könnte?
Sie sollen:
* Im Durchmesser nicht so groß sein.
* Kugelgelagert sein oder eine diesbezügliche Lagerung zulassen.
* Mit Gummi oder einem nicht zu harten, verschleißfesten Kunststoff belegt sein.
* Weiterhin sollten sie, um den Verschleiß, der ja durch die Durchmesserzunahme des äußeren Alu-Ringes von innen nach außen sicher nicht gering ist, ebenfalls eine gewölbte Oberfläche aufweisen (Punktauflage).
Gruß, Klingon77


Lesezeichen