-
 Werbung
Werbung
-
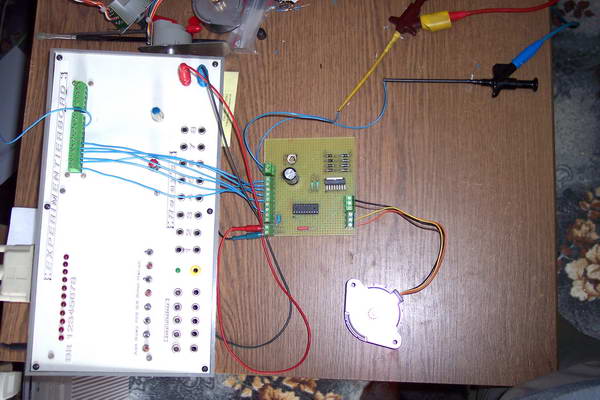
Eigener Schrittmotortreiber testweise am PC.
Hallo
Also ich möchte Anfangen mich ein wenig mit Microcontrollern und Robotik zu beschäftigen. Nächsten Monat wenn ich wieder bisschen Geld habe hole ich mir eine RN-Control zum Anfangen. Jetzt habe ich vorab schonmal eine Schrittmotorsteuerung mit L297/L298 aufgebaut und an meinem LPT-Experimentierboard angeschlossen. Es funktioniert auch soweit sehr gut, nur habe ich das Problem das meine Software (Profilab Expert) es nicht so schön hinbekommt die Impulse für die Schritte Stabil rauszugeben bei 400 Hz merkt man es manchmal das der Motor Ruckt, bei höheren Schrittgeschwindigkeiten bleibt er dann stehen und kann nicht wieder Anlaufen. Es wird deutlich besser wenn ich alle hintergrundprogramme schließe, aber wirklich "gut" läuft es dennoch nicht, nur wenn ich im Prozessmanager die Priorität für Profilab auf Echtzeit stelle dann läuft er wirklich sehr schön, allerdings kann ich dann auch garnichts mehr am PC machen, die Maus bewegt sich nicht mehr, die tastatur interessiert ihn nicht mehr, muss dann den ganzen rechner resetten um da wieder rauszukommen.
Kann man den LPT Port auch irgendwie mit mit Visual Basic .NET ansteuern ich finde da nichts, nur für die Serielle schnittstelle sind da wohl funktionen drin, aber da ist die Hilfe nicht sehr weiterhelfend, weswegen ich auch keine ahnung habe wie ich die Serielle schnittstelle nutzen könnte. Und wenn funktioniert das ganze da dann besser oder kann ich Windows für solche sachen vergessen ?
Und noch eine Frage zu dem Schrittmotor: Es ist ein Mitsumi M55SP-1 , ist es normal dass Schrittmotoren so piepende geräusche machen, man könnte denken das da nen Piezzo drin ist der Musik macht
 wenn der motor steht und man mit gewalt an der Welle dreht verändert sich die Tonlage von dem Pfeifen usw. Habe vorher noch nie was mit Schrittmotoren gemacht, bzw eigendlich auch mit Elektronik im allgemeinen nicht viel, aber da der motor richtig läuft geh ich mal nicht davon aus das er kaputt ist, und ich habe 2 von den motoren und die Geräusche machen beide.
wenn der motor steht und man mit gewalt an der Welle dreht verändert sich die Tonlage von dem Pfeifen usw. Habe vorher noch nie was mit Schrittmotoren gemacht, bzw eigendlich auch mit Elektronik im allgemeinen nicht viel, aber da der motor richtig läuft geh ich mal nicht davon aus das er kaputt ist, und ich habe 2 von den motoren und die Geräusche machen beide.
MFG
Jens R.
 Berechtigungen
Berechtigungen
- Neue Themen erstellen: Nein
- Themen beantworten: Nein
- Anhänge hochladen: Nein
- Beiträge bearbeiten: Nein
-
Foren-Regeln
Werbung 








 Zitieren
Zitieren
Lesezeichen