-
 Werbung
Werbung
-
Erfahrener Benutzer
Begeisterter Techniker
-
Hi, finde ich echt gut nur leider ist der Roboter ja nicht für der wirklichen straßen gebrauch da die Autos ja nicht 2 Motoren haben...
aber echt gut für 2 wochen hätte ich nicht so schnell geschaft.
grüße
-
Erfahrener Benutzer
Begeisterter Techniker
das ganze auf ein Modell mit 4 Reifen zu übertragen wäre wohl der nächste schritt. Das muss aber noch einen Augenblick warten
 .
.
-
Ich find das Teil auch sehr geil allerdings könnte man die Elektronik zum Einparken von Panzern benutzten.
-
Erfahrener Benutzer
Fleißiges Mitglied
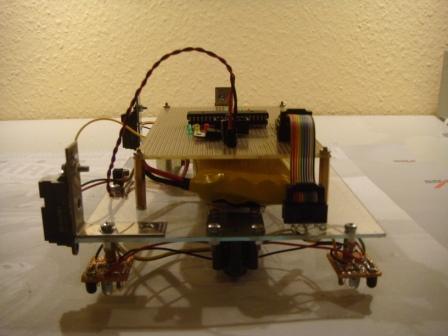
is nen schönes projekt und funktioniert auch schon gut wie ich finde. wenn ich das richtig sehe ist deine platiene doppelseitig. is die durchkontaktiert und wo hast du die gekauft?
-
Erfahrener Benutzer
Begeisterter Techniker
Das siehst du richtig sie ist Doppelseitig allerdings nicht durchkontaktiert. Die Platine habe ich geschenkt bekommen, daher weiß ich nicht woher die kommt.
-
Erfahrener Benutzer
Roboter Genie
Moin sloti.
Coole Sache! Schön mal zu sehen, dass auch was draus wird, wenn man mit dem Asuro anfängt und sich dann weiter arbeitet!
Weiter so!
www.subms.de
Aktuell: Flaschcraft Funkboard - Informationssammlung
-
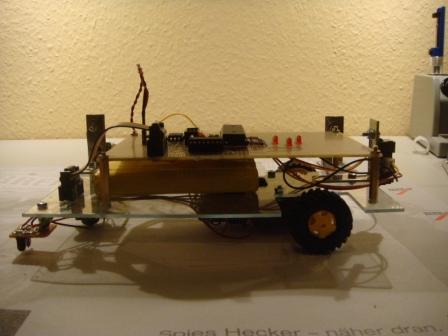
gut gemacht kanst du mir erkälren was die led anzeigen sollen???^^
-
Erfahrener Benutzer
Begeisterter Techniker
Die LEDs sind in erster Linie da, um die Leher zu beeindrucken ( das ganze ist ja immer noch ein Schulprojekt) und da die sich, bis auf eine Ausnahme, soweit ich weiß fachlich nicht so gut auskennen, wirkt es etwas spektakulärer wenn das blinkt und leuchtet
. Aber sie blinken nicht so ganz sinnlos. Die drei LED paare in rot und grün zeigen immer den jeweiligen Status der Sharpsensoren an. Jedes Paar ist für einen Sensor. Die drei anderen LEDs sind einfach status led. Ist zum debuggen ganz praktisch wenn man anhaltspunkte hat wo sich das Programm gerade befindet. Da ich mit einer ganzen menge Endlosschleifen arbeite blieb das Programm oft hängen und mit den LEDs wusste ich dann wo es hänge blieb.
mfg
Erik
-
Geändert von papitenhallo (08.03.2019 um 20:21 Uhr)
 Berechtigungen
Berechtigungen
- Neue Themen erstellen: Nein
- Themen beantworten: Nein
- Anhänge hochladen: Nein
- Beiträge bearbeiten: Nein
-
Foren-Regeln
Werbung 





 Zitieren
Zitieren




Lesezeichen