-
 Werbung
Werbung
-
Super-Moderator
Lebende Robotik Legende

Kreisbogen Linearisierung
Die Bewegung der Beine der Standbeesten von Theo Jansen https://www.roboternetz.de/phpBB2/viewtopic.php?t=25253 ist durch eine Konstruktion mit Gelenken bestimmt die durch 11 Längenangaben beschrieben wird. Wie es aussieht wird dabei eine Drehbewegung über einen möglichst großen Winkelbereich in eine gleichmäßige Linear- Bewegung umgesetzt. Da jeweils 3 Beinpaare zusammenarbeiten wird jedes für mindestens 120° verantwortlich sein.
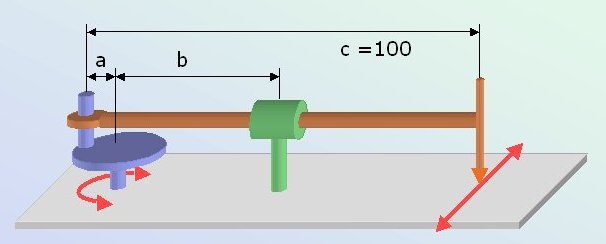
Im vorliegenden Fall soll eine Konstruktion bestimmt werden mit der eine Kreisbewegung von 180° in etwa in eine Linearbewegung umgesetzt wird. Sie enthält neben Gelenken eine drehbare Führung.
Die dargestellte Konstruktion soll die Bewegung der blauen Kurbel auf einem Halbkreis symmetrisch zur Mitte, (so gut wie möglich) in eine lineare Bewegung am anderen Ende der braunen Stange umsetzen. Die braune Stange ist in der drehbaren grünen Hülse geführt.
Die Bewegung die dabei entsteht soll (so gut wie möglich) nicht nur auf einer Geraden liegen sondern auch pro Drehwinkel die gleiche Strecke abfahren.
Für die Konstruktion sind a die Hebellänge der Kurbel und b der Abstand der Kurbelachse und der Drehachse der grünen Führung in Bezug auf c zu bestimmen.
Manfred
 Berechtigungen
Berechtigungen
- Neue Themen erstellen: Nein
- Themen beantworten: Nein
- Anhänge hochladen: Nein
- Beiträge bearbeiten: Nein
-
Foren-Regeln
Werbung 








Lesezeichen