




Zitat von MarsoTexx

Muss sein 3455,7 mm / 600 macht 0,57 mm ( statt 0,75mm )

 Werbung
Werbung


Muss sein 3455,7 mm / 600 macht 0,57 mm ( statt 0,75mm )

Ok, danke für die Infos. Was meinst du, könntest du die Genauigkeit durch höhere Übersetzungen noch verbessern? Ob sich das bei Kunststoffzahnrädern lohnt, ist allerdings auch eine Frage. Ich bin aber schonmal gespannt auf neue Bilder und eventuell Videos. Hast du denn die inverse Kinematik schon implementiert? Wie referenzierst du die Gelenke?
@malthy: Es war ja auch nur eine Bitte an ihn. Natürlich habe ich gemerkt, dass er nicht deutscher Muttersprachler ist.
Gewicht Ausgleichen, Gewicht Ersatz oder wie nennt man dass?
In Niederlandisch oder Englisch nennt man es Kompensatie oder Compensation.
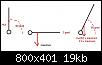
Zumerst mall ein kleine Erklarung, sehe das Bild an!
An Roboter-Arm habe ich ein Feder-Konstruktion gemacht um Teil des Geweicht "weg zu nemen".
Wie weiter der Arm reicht, wie 'schwerrer' er werd! Die Feder zorgen fur weniger 'Kraft' zum Zahnrader und Motor.
Habe es mall weiter selbst ausgesucht: man kan ein Konstruktion machen das der Arm fast kein 'gewicht' mehr hat.
Dafur reichen nun ein Par feder nicht aus! Statt Feder kann man auch ein Kontra-Gewicht-Konstruktion machen, (Industrie-roboter).
Ich habe auf mein Arm die Feder zo montiert das deutlich die 'Kraft' auf Motor reduciert ist.
Hi!
Der Unter-Arm bewegt sich jetzt:
http://www.youtube.com/watch?v=fNLe_aqAIfs
ciau.
Hallo, die Kinematik und die Inverse Kinematik: da war ich mall mit beschaftigt ohne das ich uberhaupt angefangen war ein Roboter-Arm zu bauen.
Das war in QBasic, urgendwo halberwege die '90-er..... Qbasic nu angewended da das keine 'deklaration-teil' hat im Program. Da konnte ich mich auf die reine Mathe koncentrieren und keine Schwierigkeiten mit 'Deklarationen'. Spater bin ich angefangen Alles Ubersichtlich un Net in Turbo Pascal zu programieren.
Das Meiste ligt noch irgendwo herum auf einer Diskette... Habe beschlossen mein Roboter-Arm ganz im Turbo Pascal zu programieren um das Projeckt
fertig zu bekommen.
Ein andere Programier-Umbegung werde ich dan anwenden, wenn ich mit ein neues Projeckt anfange.
Bin bekannt mit Delphi aber mochte gerne was Anderes, da werde ich mir informieren um z.B. Visaul Basic oder Anliches an zu wenden.
Dan kann ich ein Visuale User Interface programieren, wie ich mall in Delphi programiert habe (etwa 90% von Kinematik und Inverse kinematik hat schon functioniert!!!)

 Berechtigungen
Berechtigungen



 Zitieren
Zitieren
Lesezeichen