-
 Werbung
Werbung
-
Erfahrener Benutzer
Robotik Einstein
Hi,
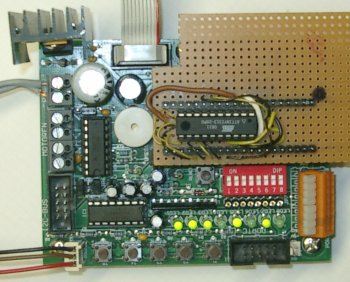
hab mir jetzt was schönes zum basteln vorbereitet:
Damit versuche ich mal die Berge und Täler des USI zu ergründen, und hoffe meinem T2313 etwas TWI-Kommunikation beizubringen.
Wenn's was wird, kann die ein- oder andere Info ins Wiki eingetragen werden.
Da ich (jetzt) keine Lust hatte ein ganzes Board für den T2313 zu erstellen, hab ich nur einen Adpater zusammengeflickt.
Der läuft jetzt mit dem Quarz des RN-Control (16MHz), und kann auch die anderen Features des RN-Control verwenden, soweit überhaupt im T2313 vorhanden.
Es geht Motortreiber, Buzzer, MAX232 und die 8 LEDs, AD-Wandler hat der ja keinen, deshalb bleibt PortA unbenutzt.
 Berechtigungen
Berechtigungen
- Neue Themen erstellen: Nein
- Themen beantworten: Nein
- Anhänge hochladen: Nein
- Beiträge bearbeiten: Nein
-
Foren-Regeln
Werbung 








 Zitieren
Zitieren
Lesezeichen