




 Zitieren
ZitierenHallo vohopri
Ein sehr schönes Projekt!!! Alle Achtung!!!
Was mich noch wunder nähme:
Wie schwer ist das Teil und wie lange hast du gebaut?
Gruss sebastian



Hallo Roboter- und Mechanikfans,
ich möchte euch meinen Linearantrieb vorstellen, nach dem er schon einige Tests erfolgreich bestanden hat.
Externes Bild anzeigen
Ziel war, die Mechanik vollständig aus gerade vorhandenem Halbzeug handwerklich zu fertigen. Lager, Stellringe usw. sind selbst gemacht. Es hat sich gezeigt, dass es gut möglich ist. Ich habe keine Drehmaschine verwendet, keinen Koordinatentisch, sondern nur die gute alte Handbohrmaschine, Bohrmaschinenständer und Handwerkzeug.
Mit diesen Mitteln erreiche ich eine Genaugkeit, die nur wenig besser als 0.5 mm ist. Nachdem man handwerklich keine grosse absolute Genauigkeit erreichen kann, aber oft eine sehr hohe relative Genasuigkeit möglich ist, muss man eben seine Methoden entsprechend anpassen. Auch der Entwurf muss schon entsprechenden Toleranzausgleich berücksichtigen.
Auf meiner Website gibt es noch mehr Information dazu:
http://www.jbergsmann.at/linearantrieb-1.htm#1
Hannes
Hallo vohopri
Ein sehr schönes Projekt!!! Alle Achtung!!!
Was mich noch wunder nähme:
Wie schwer ist das Teil und wie lange hast du gebaut?
Gruss sebastian
Freut mich, dass es gefällt. Habe auch richtig Spass daran.
Waage hab ich keine da, aber das Chassis ist 70 x 70 x30 mm gross und alle Schrauben und die Spindel sind M3. Wie schon in der Beschreibung auf meiner Site steht, sind die Zahnräder Modul 0.5 und die Achsen auch 3 mm. Das gibt dir vielleicht die Grössenordnung an.
Über die Bauzeit habe ich keinen Überblick, da ich in vielen ganz kleinen Schritten über einen längeren Zeitraum verteilt gebaut habe. Spindelmutter und Mitnehmer habe ich schon anders gebaut gehabt, aber dann verworfen und umkonstruiert. Selbst bei der nächsten Version werde ich noch mehr beim bauen forschen, als forsch bauen. Da wäre noch ein wenig Optimierung und Miniaturisierung dran: Zahnräder ins Innere des Gehäuse, in den Drucklagern auch axial Stahl auf Messing laufen lassen, statt Messing auf Messing, und in der Breite die Abstände verringern, so dass das schlanker wird.
Grüsse,
Hannes

Zunächst einmal meine Anerkennung.
Das Gerät besteht aber aus grob geschätzt 50 Einzelteilen und Du hast Dir bei so ziemlich jedem etwas gedacht.
Dafür ist die Beschreibung etwas zu kurz.
Es ist ein Linearantrieb, der, angetrieben von einem Motor und einer Übersetzung, eine Spindel antreibt und dann eine Mutter die mit einigem Versatz einen Abtrieb...
Der Versatz ist recht groß, es gibt Führungen, Stellschrauben und Schrauben zur Befestigung...
Erkläre bitte die Wirkungsweise in mindestens 5 Zeilen. Es werden sich sicher auch dann noch einige Fragen ergeben.
Manfred
Danke für die frendlichen Worte.
Die Zahl 50 ist wohl eine leichte Übertreibung, um die Komplexität zu betonen. Aus den Fotos hier ist die Funktion recht gut und ohne viele Worte ersichtlich. Danke, dass du mich darauf aufmerksam gemacht hast, dass für Betrachter Dinge erwähnenswert sein können, die für mich selbstverständlich und offensichtlich sind.
Die Untersetzung 1:5 ist ein guter Kompromiss zwischen Stellgeschwindigkeit und niedriger Betriebsspannung und geringem Stromverbrauch. Der vorhandene Motor um 90 Cent sollte verwendet werden.
Die Spindel ist eine M3 Gewindestange aus dem Baumarkt. Mit kleinen Adapterstücken aus Messing sind kurze Teile aus 3mm Silberstahlwelle angeschlossen, die in den Messingflanschen laufen. Die Stirnseiten diese Messingzylinder stützen die Stellkraft auf den Flanschen ab. Zu diesem Zweck habe ich die Zylinderchen im eingebauten Zustand vom Motor drehen lassen und mit Schleifpapier 280 stirnseitig plan geschliffen und mit körnung 1000 poliert.
Die Spindelmutter ist aus Messing, um die Spindel zu schonen. Sie ist drehbar in einer Gabel gelagert, um ein Klemmen bei Prallelitätsfehler zwischen Spindel und Schubstange und beim Durchbiegen dieser Elemente zu vermeinden.Aus dem selben Grund gibt es einen beweglichen Abstandsausgleich zwischen Gabel und Klemmung auf der Schubstange. Das kurze Stückchen Silberstahlwelle ist auf einer Seite eingepresst, auf der anderen hat es 0.1 mm Spiel.
Der Versatz wurde so gewählt, um die Funktionen Drehbarkeit und Abstandsausgleich unter zu bringen. Wie bereits gesagt, kann ich das jetzt nach bestandenen Tests miniaturisieren. Beim ersten Bau habe ich gern etwas Reserve.
Der Versatz ist auch nicht so gross, wie es auf den ersten Blick scheint. Der Versatz muss nämlich in Relation der Führungslänge in Bewegungsrichtung bewertet werden. Und das ist hier der Abstand zwischen den äusseren Enden der Messinghülsen in denen die Schubstange läuft, also rund 90 mm Führung. Dadurch ist ein Verkanten verhindert. Anders ausgedrückt, es wird vermieden, dass die Reibung durch Kantenpressung ansteigt. In Vorversuchen habe ich festgestellt, dass bei dem gegebenen Spiel der Schubstange im Röhrchen von ca 0.25 mm die Gefahr des Verkantens ohne besondere Vorkehrungen durchaus gegeben ist.
Die Führungen sind zunächst nur stramm in die Flansche eingepresst. Nach dem ersten Einbau werden sie ausgerichtet und auf Leichtgägnigkeit überprüft. Dann vorsichtig wieder ausgebaut und gelötet.
Das Klemmteil betätigt in der oberen Endstellung den entsprechenden Endschalter, eine justierbare Scheibe macht das in der unteren Endstellung. Dioden zur Überbrückung der Endschalter werden nicht verwendet.
Die Länge in Spindelrichtung wollte ich nicht grösser haben, damit das als Auslöser für eine Kamera nicht höher wird als diese. Von anderen Einsatzzwecken wie Türverriegelung und Öffnen von Möbeltüren erwarte ich eine kräftige und auch exzentrische Belastung.
Hannes
Ja, danke, mit den weiteren Bildern und der Erklärung wird es glaube ich klar.
Ich habe auch einmal ein Linearservo aufgebaut und dabei versucht die Toleranzen und das Spiel klein zu halten. Das Ziel dabei war, durch Justieren die Ausgleichselemente gering zu halten. Als Ausgleichselement war nur noch bei der Ankopplung des Motors ein Schlauchstück notwendig.
Die übrigen Justierungen wurden durch ein "Reflow" der dafür vorgesehenen gelöteten Montagepunkte in der entsprechenden Stellung erreicht.
Manfred
https://www.roboternetz.de/phpBB2/viewtopic.php?t=10419
Ja, Manfred, die Beschreibung von deinem Positioniertisch kenne ich und der hat mir früher schon sehr gut gefallen.
Im Vergleich sind sehr interessante Unterschiede zu sehen.
Anscheinend prägt es sehr, welche Art von Abfällen man so in der Schrottkiste liegen hat. Vernünftigerweise arbeiten wir mit dem, was so gerade vorhanden ist.
Dein "Ziel dabei war, durch Justieren die Ausgleichselemente gering zu halten." Mein Ziel war, durch Ausgleichselemente, eine höhere Belastung der vorhandenen Materialquerschnitte zu ermöglichen. An deinem Schlitten wirken anscheinend geringe Widerstände und die scheinen nicht verdrehend zu wirken. Ich erwarte grössere Kräfte die auch verdrehend ansetzen können.
Eine Schlittenlösung hatte ich auch kurz überlegt, aber verworfen, weil sie mir zu viel Platz in der Länge verbraucht hätte, oder den Hub verkürzt hätte.
Lösbar waren erfreulicherweise anscheinend beide Aufgaben.
Grüsse,
Hannes
Die Konstruktion des Linearservos war der Versuch den Grundaufbau mit Epoxyplatten zu machen die sich gut löten lassen, die Justierung über eingelötete Messinghülsen zu machen die sich in der Position ausrichten lassen und die Gewindestange mit Motor als Antrieb zu nehmen. Es freut mich natürlich wenn es Beachtung gefunden hat.
Ich wollte dann noch einmal konkret nach der Konstruktion bei Deinem Linearantrieb und dem Toleranzausgleich fragen:
Der Motor und das Getriebe ist wohl klar, die Gewindestange ist mit dem Zahnrad verbunden und gelagert.
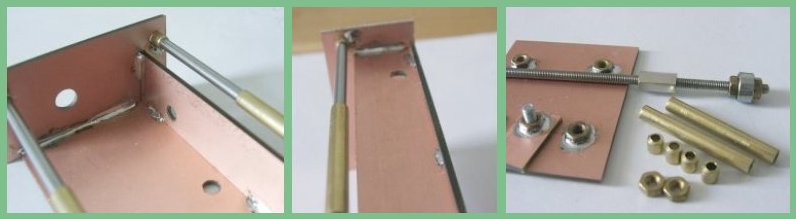
In Bild 2 ist die Spindelmutter mit einem L - förmigen Messingteil "a" zu sehen. (oder genauer [fliph:df9b7f769e]L[/fliph:df9b7f769e]- förmig)
Daran ist ein weiteres [flipv:df9b7f769e]L[/flipv:df9b7f769e] - förmiges Teil "b" befestigt.
Dann kommt eine Welle "c" zu dem Block "d" der es mit der Schubstange, dem Abtrieb, verbindet.
Der Block d ist mit einer Schraube auf die Schubstange geklemmt, nehme ich an.
Wäre theoretisch alles exakt ausgerichtet, dann könnte die Spindelmutter a starr mit dem Block d verbunden sein.
Könntest Du bitte noch kurz erklären welche Funktion die Teile dazwischen haben? Welche sind fest montiert, (z.B. die Schraube in Teil b?) und welche sind Führungen oder Gelenke, die sich über dem Weg verschieben, wenn die Achsen nicht ganz parallel sind?
(Dreh-Gelenk zwischen a und b? gesichert?)
(Dreh-Gelenk und Führung zwischen c unc d?)
Manfred
Jetzt verwirrst du mich. Ich finde keine L förmigen Bauteile.
Bevor sich die Beschreibung im Kreis dreht, frage ich vorsichtshalber, was an dem so unverständlich ist:
Worauf willst du eigentlich hinaus?Die Spindelmutter ist aus Messing, um die Spindel zu schonen. Sie ist drehbar in einer Gabel gelagert, um ein Klemmen bei Prallelitätsfehler zwischen Spindel und Schubstange und beim Durchbiegen dieser Elemente zu vermeiden.Aus dem selben Grund gibt es einen beweglichen Abstandsausgleich zwischen Gabel und Klemmung auf der Schubstange. Das kurze Stückchen Silberstahlwelle ist auf einer Seite eingepresst, auf der anderen hat es 0.1 mm Spiel
Hannes
Ich will nur die Konstruktion verstehen.
Die Gabel habe ich zunächst in dem Bild nicht richtig erkannt (mein Fehler), sie hat im Bild im unteren Teil eine Linie die ich als Trennung angesehen habe.
Sie ist aber wohl aus einem Stück.
Dann würde mich noch interessieren wie die Verbindung zwischen Spindelmutter und Gabel hergestell ist. Ist dort in der Spindelmutter auf jeder Seite eine Welle eingepresst oder wie befestigt?
Manfred
Externes Bild anzeigen
 Berechtigungen
Berechtigungen

Lesezeichen