-
 Werbung
Werbung
-
Super-Moderator
Lebende Robotik Legende

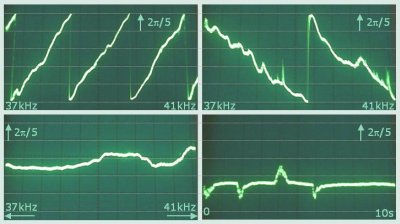
Das flankengetriggerte FF holt die gesamte Phaseninformation aus dem Signal heraus.
0 bis 360° oder
-180° bis +180°
Wie man die Phase bei größeren Verschiebungen mißt, ist im Link besprochen, mit "synthetischer Frequenz" also durch Variation der Arbeitsfrequenz die ja dann bei konstanter Laufzeitdifferenz eine unterschiedliche Phasenverschiebung bringt.
Manfred
https://www.roboternetz.de/phpBB2/viewtopic.php?t=16515
 Berechtigungen
Berechtigungen
- Neue Themen erstellen: Nein
- Themen beantworten: Nein
- Anhänge hochladen: Nein
- Beiträge bearbeiten: Nein
-
Foren-Regeln
Werbung 








 Zitieren
Zitieren
Lesezeichen