-
 Werbung
Werbung
-
Erfahrener Benutzer
Roboter Experte
-
Erfahrener Benutzer
Roboter Experte
-
Erfahrener Benutzer
Roboter Experte
-
Erfahrener Benutzer
Roboter Experte
-
Erfahrener Benutzer
Roboter Experte
Hi,
das ist ja mal ein heißes Gefährt!
Was kann es denn bis jetzt alles und was hast du damit vor?
Du hast di Sensoren zum Linienverfolgen ziemlich in der Mitte, geht das noch gut? Was für eine Regeltechnik verwendest du zum verfolgen an?
Viele Grüße,
Mehto
-
Erfahrener Benutzer
Roboter Experte
Danke für's Lob

Heute bin ich erst gerade mit dem Zusammenbau fertig geworden, sodass ich die Kraft der Motoren testen konnte.
Alles weitere kommt erst später (auch das programmieren).
Dieses WE bestell ich mir noch die 3 Sharp's, Kompass und die Bascom Vollversion, da die Demo einfach zu klein ist.
Kann damit noch nicht einmal beide DS1820 auslesen und die Werte auf dem LCD ausgeben [-( (Programm zu groß).
Also muss ich bis zum programmieren erst noch ein bisschen warten.
Zur Frage:
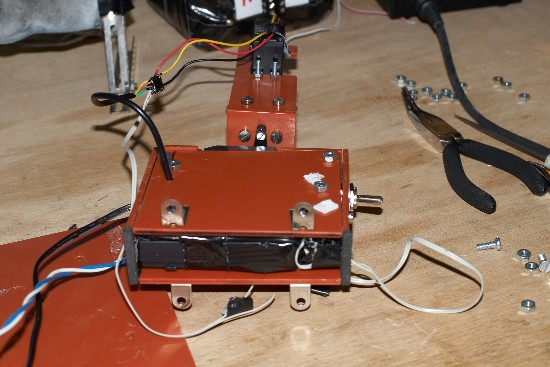
Den mittleren Optokoppler lasse ich immer an und werte die Spannung aus. Ändert sich diese gravieren, so lasse ich den Bot langsamer fahren und die anderen 4 CNY70's per Transistor mit Strom versorgen, dafür lege ich die 4 LDR's lahm (kommen später auf den Turm - auch per Transistor verbunden, da die CNY70's und die LDR's sich jeweils einen analogen Port teilen)
https://www.roboternetz.de/phpBB2/ze...399&highlight=
Danach lasse ich ihn per PWM und nach den eingelesenen Spannungswerten steuern.
Ich habe die Bake für sehr schmale Linien oder Fäden ausgelegt.
-
Erfahrener Benutzer
Roboter Experte
Ich habe jetzt nochmal einwenig rumprobiert, vor allem mit der Kraft der Motoren per Software.
Also irgendwie kann das mit dem 30:1 Getriebe nicht hinhauen.
Der Bot ist mittlerweile 4,4 kg schwer, aber das kippt trotzdem fast beim anfahren nach hinten und beim bremsen übelst nach vorne.
Nur das lenken ist ein bisschen blöd, da der Bot dabei ruckt.
Man kann sich das wie bei einem Motorboot vorstellen, nur das hierbei die Räder kurz vom Boden abheben und dann wieder runterkommen und sofort wieder mit der Drehung des Bot's beginnen.
Nun, entweder ist die Übersetzung doch nicht ausreichend, da die Drehung eigentlich homogener verlaufen sollte oder es ist konstruktionsbedingt (Rad-/Achsabstand und Bothöhe).
Was meint ihr

Ach ja, den einen DS1820 hat's auch erwischt, zeigt nur noch 85 Grad an (da hilft kein Reset, kein "Kaltstart" oder löten), mist (wieder 5 weg).
Aber eigentlich kann ich froh sein, dass bei dem malheur letzter Woche nicht alles kaputt ging

Und:
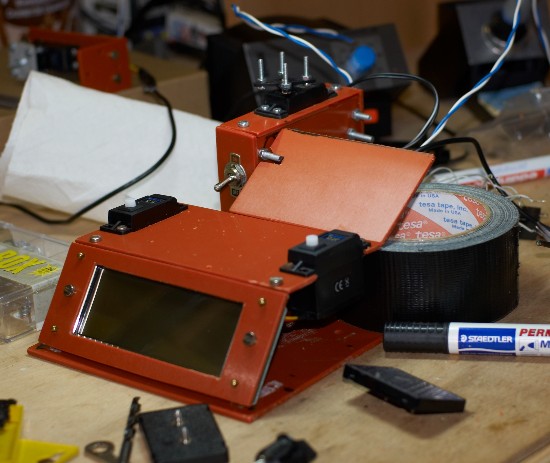
Das sind meine Werkzeuge.
Allen voran der sehr gute günstige Akkuschrauber (kennt nur aus und volldampf, daher keine lineare Drehzahlsteigerung) und mein Gerber Legend 800 mit der 5,5cm Wolfram Carbid Säge.
Das Tool ist einfach nur der Hammer \
 / !
/ !
Natürlich nicht zu vergessen die Ersa Lötstation mit Ersadur Dauerlötspitzen (hatte vorher eine absolute Krücke).

-
Erfahrener Benutzer
Roboter Experte
-
Erfahrener Benutzer
Roboter Experte
-
Erfahrener Benutzer
Fleißiges Mitglied
Sieht echt cool aus
ich finde deinen robby echt klasse jetzt wo der abstand der Räder größer
ist, sieht er noch mal cooler aus.
Das Bild wo er so im Gras fährt find ich hammer geil.
wäre cool wenn du mal ein Video reinstellen würdest, ich bin schon gespant
Gruß
 Berechtigungen
Berechtigungen
- Neue Themen erstellen: Nein
- Themen beantworten: Nein
- Anhänge hochladen: Nein
- Beiträge bearbeiten: Nein
-
Foren-Regeln
Werbung 








 Zitieren
Zitieren







Lesezeichen