




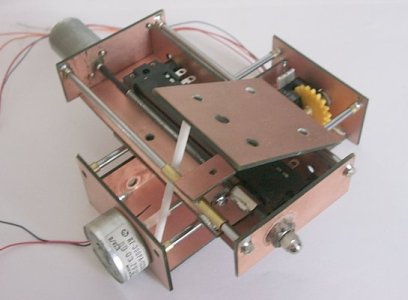
Sieht interessant aus.
Es sieht aus wie ein 25 Gang Poti.
Bei einem anderen Linearservo hier im Forum geht es gleich von der Gewindstange auf einen Scheiberegler.
https://www.roboternetz.de/phpBB2/viewtopic.php?t=10419

 Werbung
Werbung


Sieht interessant aus.
Es sieht aus wie ein 25 Gang Poti.
Bei einem anderen Linearservo hier im Forum geht es gleich von der Gewindstange auf einen Scheiberegler.
https://www.roboternetz.de/phpBB2/viewtopic.php?t=10419
 Berechtigungen
Berechtigungen


 Zitieren
Zitieren
Lesezeichen