Ich kann mir nur gar nicht vorstellen wie das funktionieren soll, mit diesen Bildern. Daher kann ich auch noch keine Verbesserungen vorschlagen. Daher warte ich jetzt mal wie das fertig aussehen soll.

Druckbare Version
Ich kann mir nur gar nicht vorstellen wie das funktionieren soll, mit diesen Bildern. Daher kann ich auch noch keine Verbesserungen vorschlagen. Daher warte ich jetzt mal wie das fertig aussehen soll.
Was macht der Beitrag eigentlich in der Rubrik: "fertige Roboter" das ist doch ein Projekt welches gerade in der Entstehung ist.
Ähm bei der Beschreibung stand fast fertige Projekte hier posten und daran habe ich mich gehalten. Ich bin ja gerade auf den letzten 10%Zitat:
Zitat von HannoHupmann
damit wird die Funktionsweise auch nicht viel deutlicher, da ich nicht erkennen kann um welche Achsen sich welches Segment drehen soll. Auf den Bildern sieht es nache einem Teil aus ohne Achsen (was es ja wohl kaum sein kann) auch ist nicht erkennbar welche Freiheitsgrade angestrebt werden.
Außerdem stellt sich für mich die Frage welche Arbeitsbereiche das Bein abdeckt oder mit anderen Worten welche möglichen Winkeln in den Achsen angestrebt werden.
Hab mal alles was fest ist Schwarz gefärbt (ich weiß is schlecht ohne Hitnergrund).
Pro Bein werden 6 Freiehitsgrade
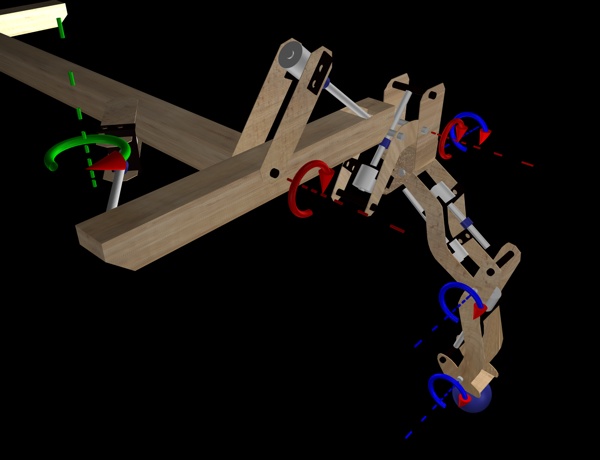
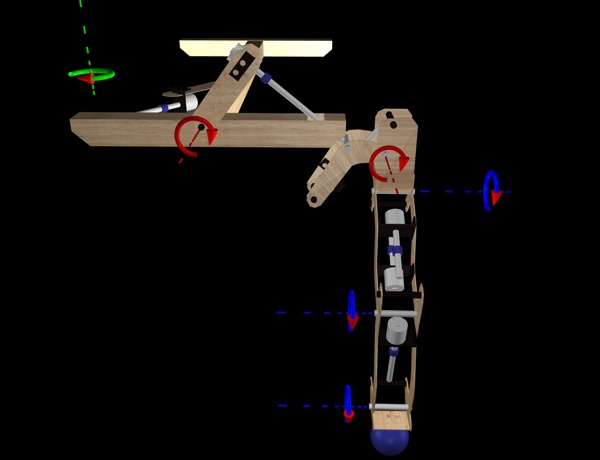
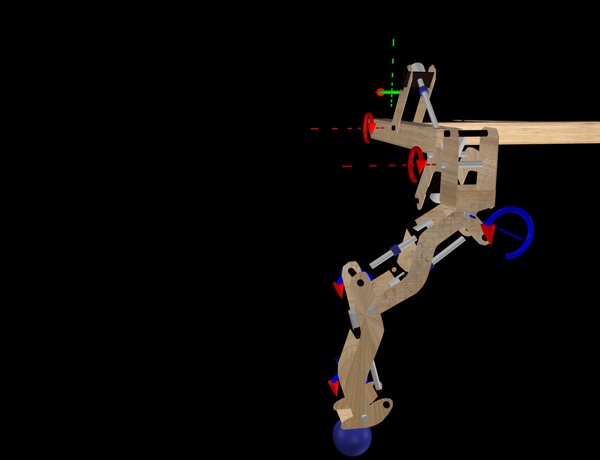
So klar geworden? Falls nicht bitte posten.
Ah die grüne Achse ist falsch da hab ich mich gerade vertan die sitzt natürlich oben voren in der Mitte !
Hi nette Bilder.
Bewegt das teil sich nicht in zeitlupe? Ich meine schnell kann es nicht sein oder?
Und nurnoch 10% arbeit meinst du?
Du hast ja bis jetzt kein nicht am PC erstelltes Bild gezeigt, also ein paar bilder/vids vom robo wären nett.
Allein die Programmierung und die ansteuerung von so vielen schrittmotoren... das wird arbeit.
Das ist die kleinste SacheZitat:
Zitat von Razzorhead
Ähm nein!!!
Ich baue das "Gerüst" (den Körper) diese Woche und löte die Lektronik fertig und dann das bischen Programmieren geht in 2 Tagen und fertig ist der Prototyp. Der Zeitplan ist ja nur für gerades Luafen ohne Sehsystem und Reflexe.
Ich programmeire ja in C++ und das kann ich!!! Die biliotheken sind soweit auch schon fetig also Schrittmotor Ansteuerung LCD Display UART, I2C Bus, Mathematik (matrizen vektoren...)
jetzt muss ich nur noch ein paar Differentialgleichungen aufstellen die Gangart festlegen das Programmieren. Da ich von Mathematik zufällig auch genug Ahnung habe ist das der kleisnte Teil das geht ruck zuck
Ja der Roboter wird sehr langsam seien solange wie noch Schrittmotoren statt pneumatischen linear Antrieben drin sind.
Aber es geht ja um die erforschung des dynamischen Laufens.
Ach udn ersteinmal allgemein wenn alles fertig geplant... ist dann geht der Rest auch schenell.
Und zu den 10% ich habe mich ja erst einmal Wissenschaftlichen mit dem Luafen beschäftigkt und dann alles Entwickelt das ist größenteils per Hand aufm Blattpapier (die Zeichnungen), deswegen erstelle ich sie jetzt erst mitm PC.
EDIT: und nicht zu vergessen, das ich die WOche jetzt noch 3 Abi-Klausuren schreibe
2 LKs + 1 GK wer es nicht weiß -.-^^
Verstehe uns ein wenig, wir haben schon einiges mitbekommen und wissen, was an Arbeit und Zeit in solch Projekten steckt. Persönlich würde ich deines auch in die Kategorie "geplante Projekte" stopfen.
Die 3D-Bilder sind genauso auch für mich nur ein Teil des Ganzen, eher die Planungsphase \:D/
Also wenn das nächste Bild ein reales Teil aus Alu, Holz oder was weiss ich aus deinen 3D-Ansichten darstellt, dann wird es greifbar ;)